
Shenzhen Just Motion Control electromechanics co., ltd
0755-26509689
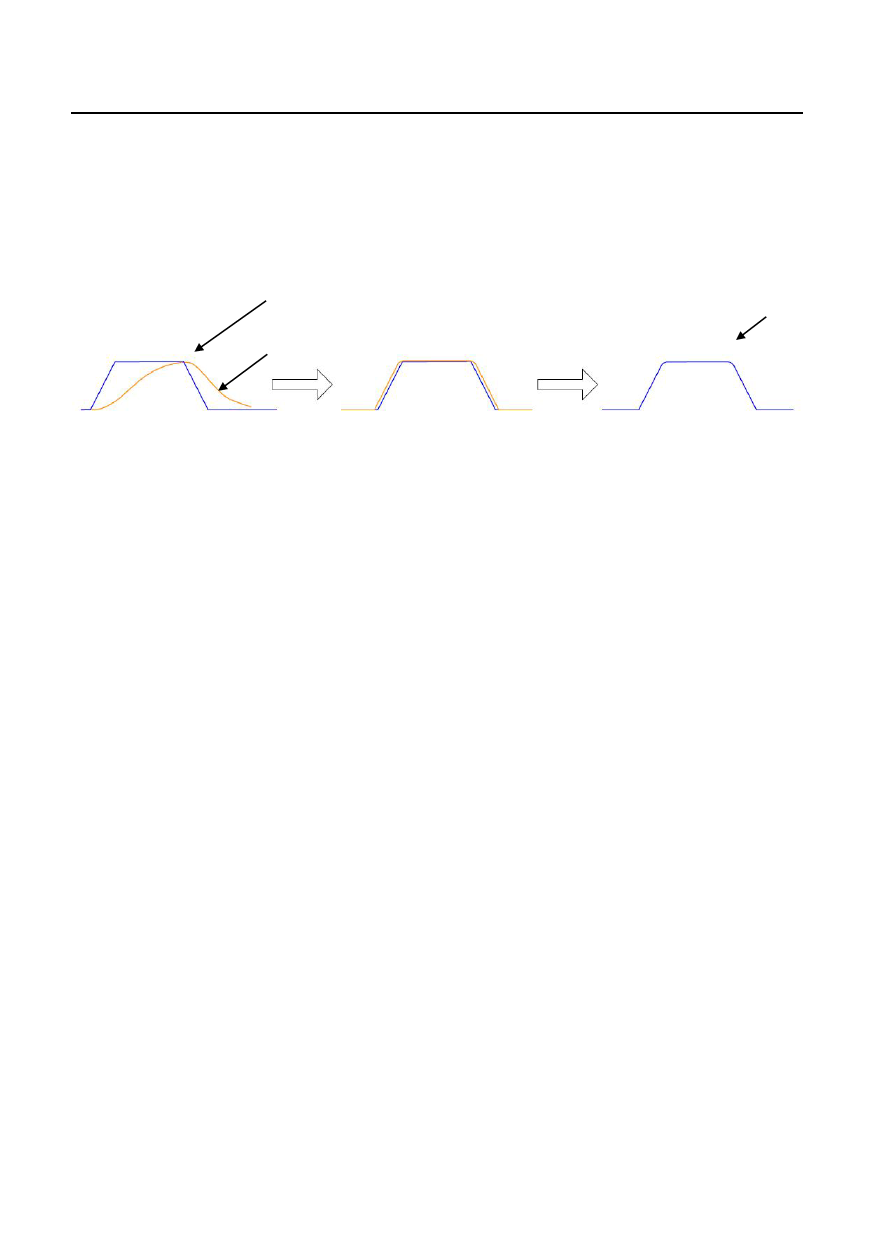
7.2 parameter adjustment
According to the equipment requirements, after selecting the appropriate control mode, the servo gain parameters
need to be adjusted reasonably. The servo driver can drive the motor quickly and accurately, and maximize the
mechanical performance.
Gain setting: Low
speed
setting
velocity
Gain setting: Medium
Two
lines
Gain setting: Highc+oincide
Feedforward
Position loop gain: 800 Position loop gain: 1600
Position loop gain: 1600
Speed loop proportional gain: 400
Speed loop proportional gain: 600
Speed loop proportional gain: 600
Speed loop integration time constant: 1000
Speed loop integration time constant: 1000
Speed loop integration time constant: 1000
Speed Feedforward Gain: 0 Speed Feedforward Gain: 0 Speed Feedforward Gain: 50
Load inertia ratio: 100 Load inertia ratio: 100 Load inertia ratio: 100
The servo gain is adjusted by several loop parameters (position loop, velocity loop, filter, etc.), which affect each
other. Therefore, the gain setting needs to be balanced and adjusted according to certain rules.
63
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")