
Shenzhen Just Motion Control electromechanics co., ltd
0755-26509689
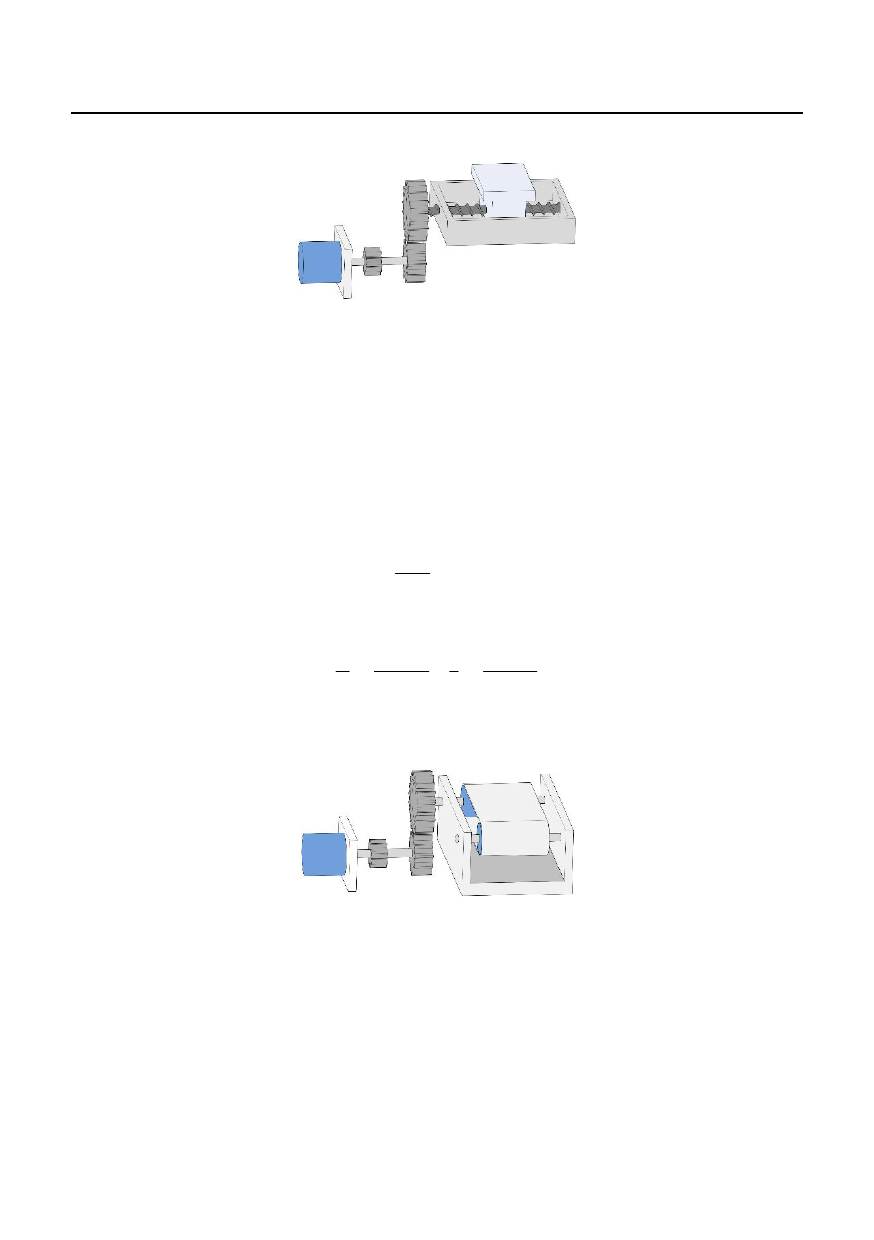
Assumptions:
(1) Mechanical parameters: reduction ratio R is 2/1, lead screw is 10mm
(2) Absolute encoder position ring resolution per turn:8388608
(3) Load displacement corresponding to 1 position command (command unit) is required: 0.001mm
Then:
From (1) and (3), the value of position command (command unit) required for 1 revolution of
lead screw (10mm movement of table) can be obtained:
10 =10000
0.001
The electronic gear ratio is: (B is numerator, A is denominator)
Β 8388608 2 1048576
Α 10000 1
625
Last parameter P03-40 set to 1048576, P03-42 set to 625
2、pulley drive
Assumptions:
(1) Mechanical parameters: reduction ratio R: 5/1, pulley diameter: 0.2m(pulley circumference:
0.628m)
(2) Absolute encoder position ring resolution per turn:8388608
(3) Load displacement corresponding to 1 position command (command unit) is required: 0.000005m
Then:
49
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")
 JAND P28 15002 DB44 AC Servo Driver User Manual")