
成都兴多维科技有限公司
Chengdu multidimensional robotization technology company
uniquely determined using a mechanical coordinate system. Every time
the power is turned off and restarted, the system needs to return the
machine to the mechanical zero point after the system stops.
3.1.2 Workpiece coordinate system
The workpiece coordinate system is used by the programmer during
programming. The programmer selects a known point on the workpiece as
the origin (also called the program origin) and creates a new
coordinate system called the workpiece coordinate system. The
workpiece coordinate system is also a set of right-handed coordinate
system. The origin of the workpiece coordinate system (ie the
workpiece origin) is determined relative to a certain point on the
workpiece, and can be floated relative to the mechanical coordinate
origin. The origin selection of the workpiece coordinate system
should be as simple as possible, such as simple programming, simple
size conversion, and small machining error.
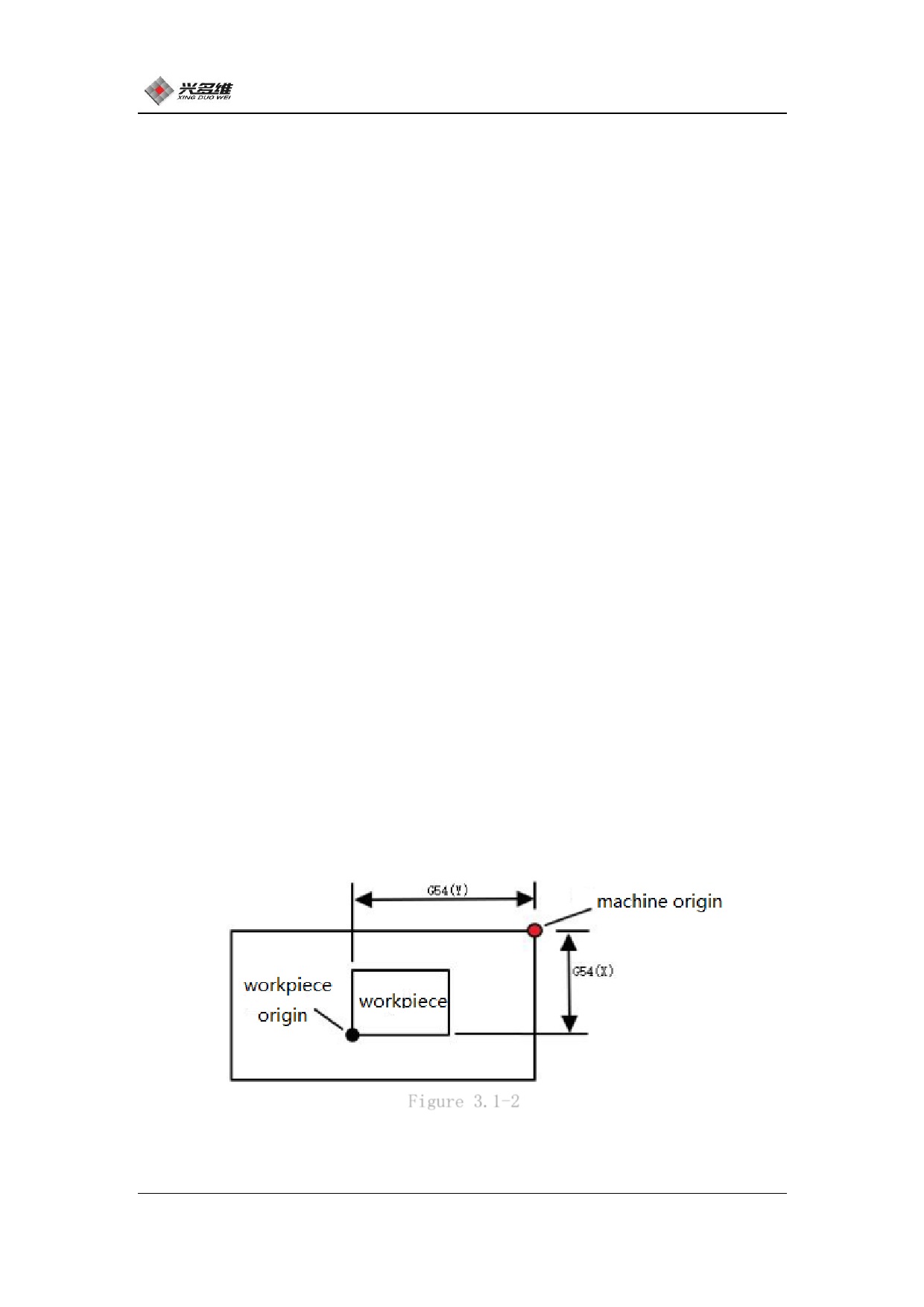
The workpiece offset corresponds to the coordinate system G54,
G55, G56, G57, G58, G59. When the system is turned on, the default
coordinate system is G54. The relationship between workpiece offset
and mechanical coordinate system is shown in Figure 3.1-2.:
Figure 3.1-2
25
兴于思 维至精
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")
 FlatCUT Oscillating Blade MDR CNC Router System CCD User Manual")