
第七章 调整与功能应用
调整方法:增大 PA1.10,可提高响应,但加减速时候可能产生速度过冲。
减小 PA1.11,可辅助增强速度前馈效果,反之,增大 PA1.11,可抑制速度前馈效
果应反复调整 PA1.10 和 PA1.11,取得平衡性好的设定;
位置指令输入的更新周期与驱动器的控制周期相比较长时,或脉冲频率不均等的情况下,
工作声响可能在速度前馈有效时变大。这种情况时, 请增大 PA1.11 的值或使用位置指令滤
波器(一次延迟/FIR 平滑)。
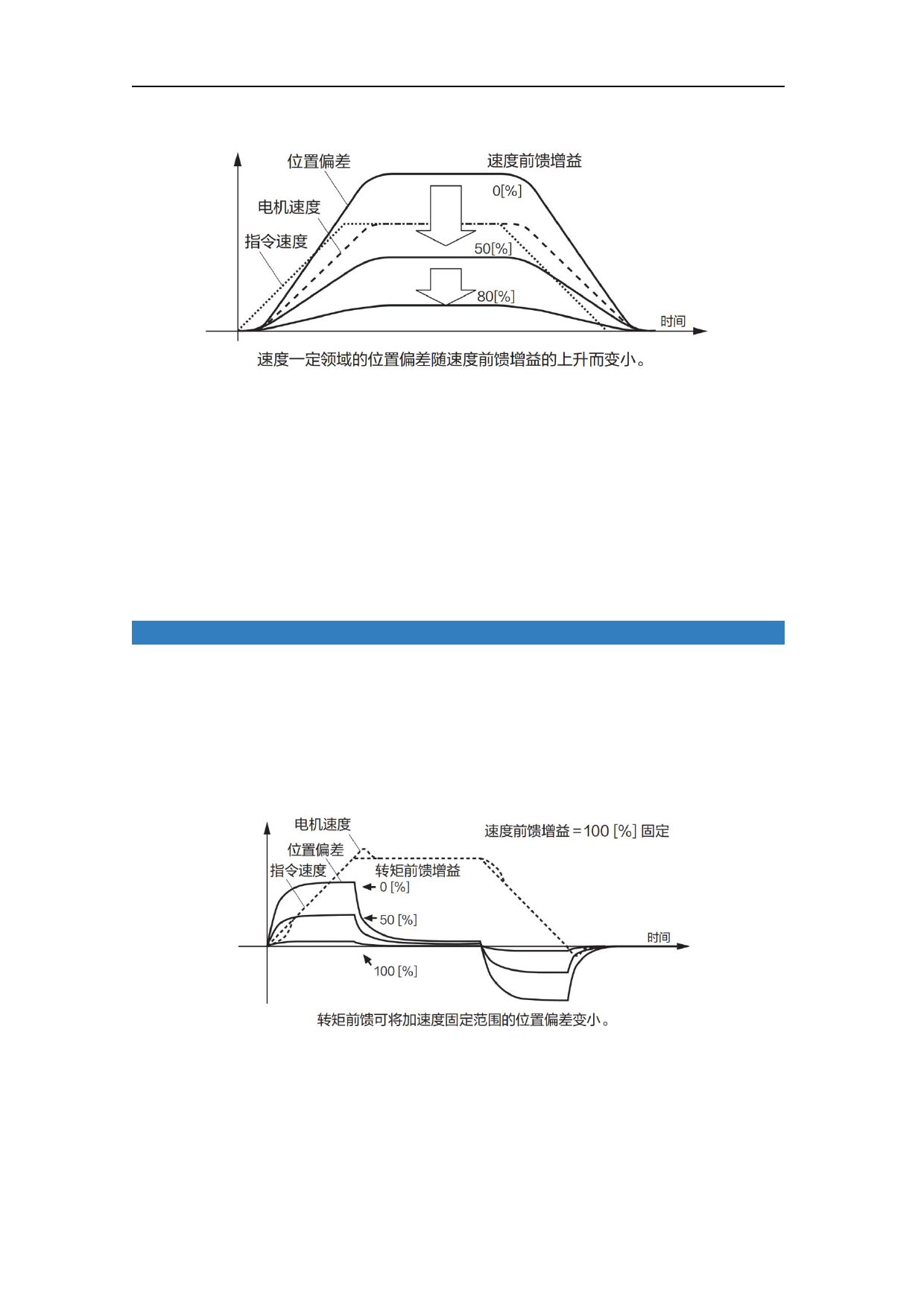
转矩前馈使用示例
·使用转矩前馈时,需正确设定惯量比。请将从机械设备中所计算或惯量识别出的惯量比
设定为 PA0.04「惯量比」。
·提高转矩前馈增益,由于可将固定加减速时的位置偏差接近 0,所以在扰动转矩不工作
的理想条件下,在梯形速度模式下驱动时,可以在整个动作区间使位置偏差大致接近于 0。
调整方法:增大 PA1.12,可提高响应,但加减速时候可能产生速度过冲,位置偏差变大。
减小 PA1.13 可辅助增强转矩前馈效果,反之,增大 PA1.13,可抑制转矩前馈效
果、降低噪音,应反复调整 PA1.10 和 PA1.11,取得平衡性好的设定。
260
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")