
第七章 调整与功能应用
PA1.18
位置控制切换磁滞
33
PA1.19
位置增益切换时间
33ms
注意:实时自动调整模式设定为定位模式时,增益切换功能自动开启,但不可变更增益切换
模式,如需修改切换模式,请把自动调整模式设定为手动模式。
负载整定类型
用于选择负载类型,根据负载惯量比的大小及机械结构特点进行选择
0x00_:刚体 负载为刚性较好的类刚体且负载惯量不大时选择本模式,增益策略优先保证
系统响应性,典型结构为直连高精度减速机,丝杆,齿轮齿条等结构。
0x01_:大惯量 负载惯量比较大(10 倍以上)时选择本模式,增益兼顾设备运行平稳性与响
应性。大惯量负载类型下,建议设置刚性等级不要大于 15。
0x02_:柔体 负载为刚性较差的柔性结构且负载惯量比较大时选择本模式,增益策略优先
保证运行平稳性,典型结构为较长的皮带,链条等结构。
注意:
1.大惯量免调整模式的惯量比参数不会因为自适应而更新惯量比参数,原有参数不会改变
2.虽然大惯量免调整模式不需要进行设定惯量比,但设定更准确的惯量比,能让调试效果更
佳。
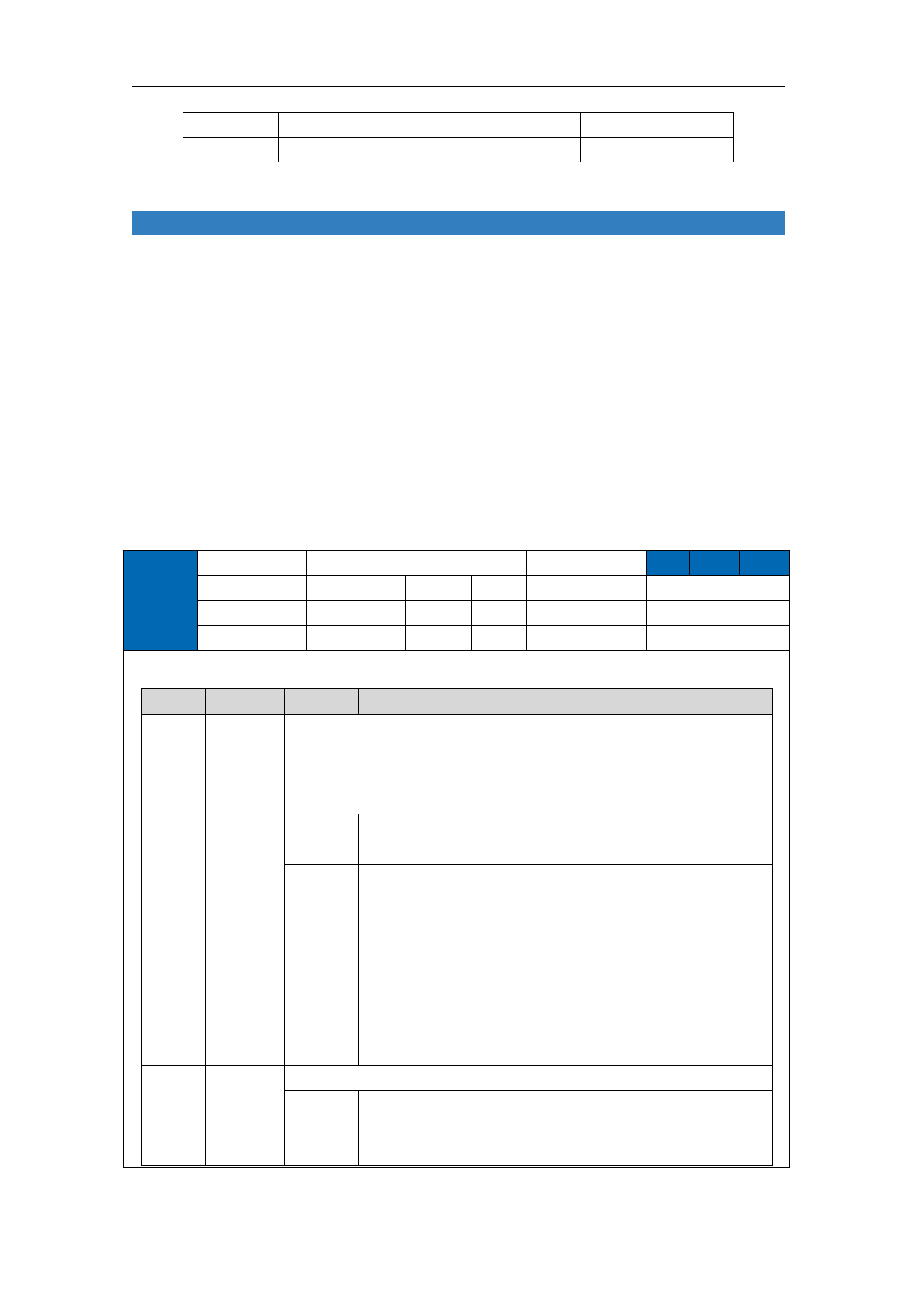
■ 关联参数
参数名称
实时自动调整设定
有效模式
PS T
设定范围
PA0.02
数据长度
0x0~0xFFF 单位
16bit
属性
— 标准出厂设定 0x002
R/W 485 地址
0x0005
生效方式
立即
设定实时自动增益调整的动作模式:
数据位 类别
设置
应用
用于设置运动整定模式,根据运动特点或整定需求进行选择。一般建
议无特殊需求时选择通用性好的 1 模式(标准),快速定位需求选择 2
模式(定位),在 1 模式和 2 模式都无法满足要求时选择 0(手动)模
式。
PA0.03(实时自动调整刚性设定)无效,需手动进行增益调
0:手动
整,可根据需要手动调整各项增益值。
运动整定
PA0.03(实时自动调整刚性设定)有效,更改该刚性值可实
0x00_
模式
1:标准 现快速增益调整,不同刚性值对应不同增益组合。本模式不
使用增益切换,适合更重视稳定性的场合。
PA0.03(实时自动调整刚性设定)有效,更改该刚性值可实
现快速增益调整,不同刚性值对应不同增益组合。本模式使
2:定位 用增益切换,适合更重视快速定位的场合。【垂直安装的重
力负载轴不建议使用本模式,或配合 PA6.07(转矩指令加
算)对重力负载进行补偿后使用】。
用于选择负载类型,根据负载惯量比的大小及机械结构特点进行选择
负载整定
负载为刚性较好的类刚体且负载惯量不大时选择本模式,增
0x0_0
类型
0:刚体 益策略优先保证系统响应性,典型结构为直连高精度减速
机,丝杆,齿轮齿条等结构。
242
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")