
第七章 调整与功能应用
第七章 调整与功能应用
7.1 概述
7.1.1 增益调整目的
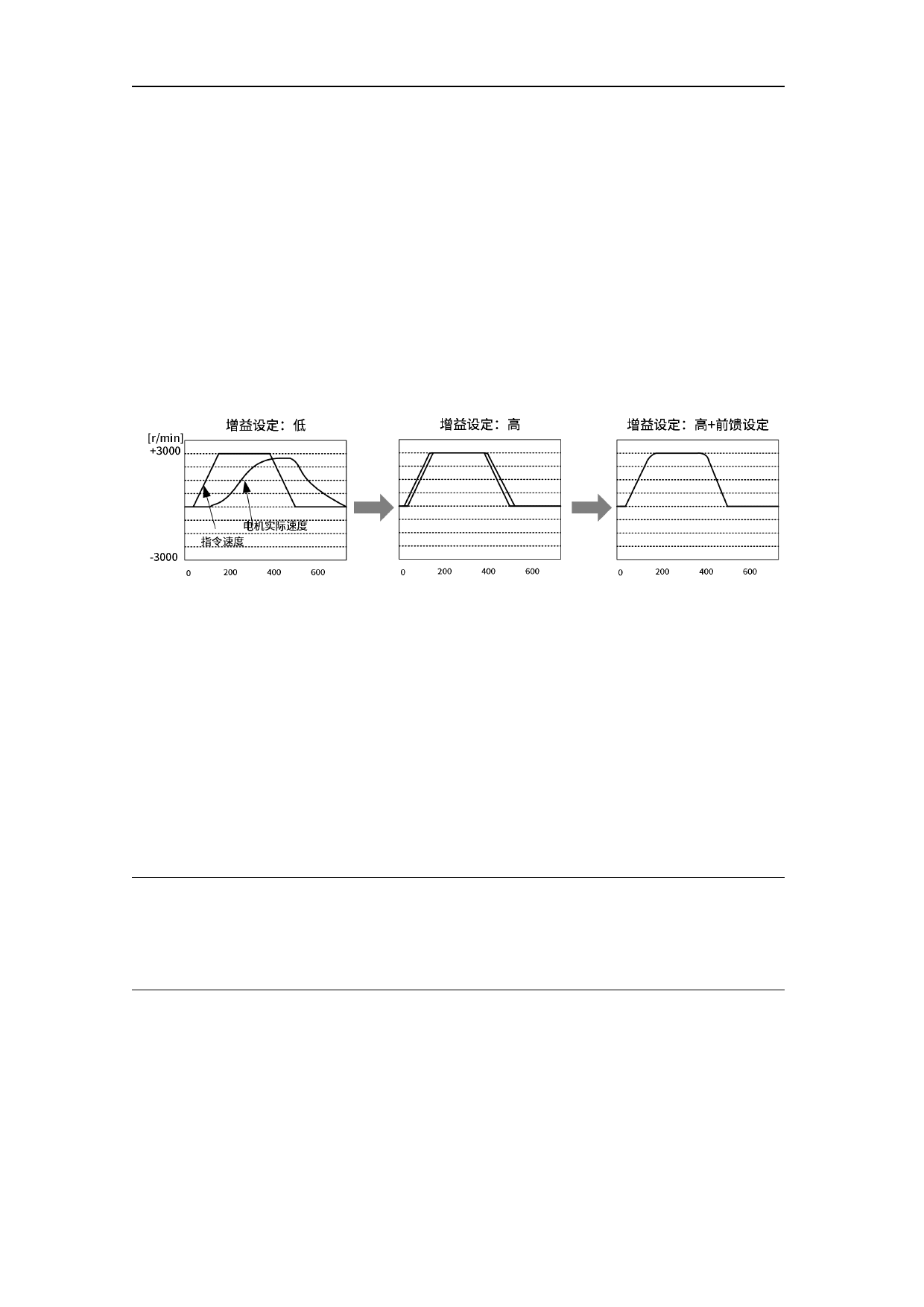
对从上位控制器发出的指令,驱动器需要尽可能的让电机忠实的按照指令且没有延迟地
进
行工作。为了让电机动作更加接近指令,最大限度的发挥机械的性能,就需要进行增益调整。
位置环增益:320 (0.1/s)
速度环增益:180 (0.1Hz)
速度环积分时间常数:31 ms
速度前馈:0
惯量比:250
位置环增益:900 (0.1/s)
速度环增益:500 (0.1Hz)
速度环积分时间常数:31 ms
速度前馈:0
惯量比:250
位置环增益:900 (0.1/s)
速度环增益:500 (0.1Hz)
速度环积分时间常数:31 ms
速度前馈:200
惯量比:250
伺服增益通过多个参数(惯量比,位置环增益,速度环增益,滤波器等)的组合进行设定,
且这些参数之间互相有影响,所以,伺服增益的参数设定必须考虑到各个参数设定值之间的
平衡。
说明
在进行增益调整之前,建议先进行点动试运行,确认电机可以正常动作!
216
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")