Home
3D
PrintUP 3D Printer
PioCreat 3D Printer
Printers
FastCOLOUR >>
ATools
DTF Textile
UV-DTF
PrinExp
InkRIP
Lasers
TruCUT CO
2
>>
TruCUT RDWorks
TruCUT 2020+
TruCUT Express
TruCUT Lite >>
4030 & Vertical Software
4030 & Vertical Documents
New 6040 Desktop
LabelMark
RayCUT
MorCUT >>
MorCUT-Cyclops
LaserMaster
Plasmas
MetalWise
Fabricam
Routers
EasyRoute
PowerRoute
Blade Cutters
Vinyl Cutters >>
V-Series
V-Smart
V-Auto (& V-Smart+)
Vinyl4
Flatbed Cutters >>
FlatCUT
Label Cutters >>
V-Auto Label Cutters
Software >>
VinylCut
More
FastCUT
Heatware
Rollman
ScreenMaster
Other Software
Miscellaneous
AM.CO.ZA
/
Buy CNC Software
/
CNC Software Training
/
CNC Software Downloads
Sales: 072 222 2211
Support: 076 666 6655
Training: 060 818 1818
Jo’burg: 087 802 5368
Cape Town: 087 802 7106
An
Project
Multimedia
Univision Videos
#SortIT Videos
MakersLab.TV
Software Training
Welldone Gallery
Updates
Prevision Blog
Cornerstone Trust
Email Campaigns
Contact Us
Sales WhatsApp
060 600 6000
Support WhatsApp
060 600 7000
Johannesburg Headquarters
011 397 1429
087 802 5368
Cape Town Showroom
021 555 3250
087 802 7106
Links
CNC Machine Repair
Vinyl Cutter
Heatware
You are here:
AM.CO.ZA
Buythis
CNC Utilities Homepage
RAYCUT-Fiber-Laser-Machine
Component Manuals
雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271.pdf
Page 220 of 380
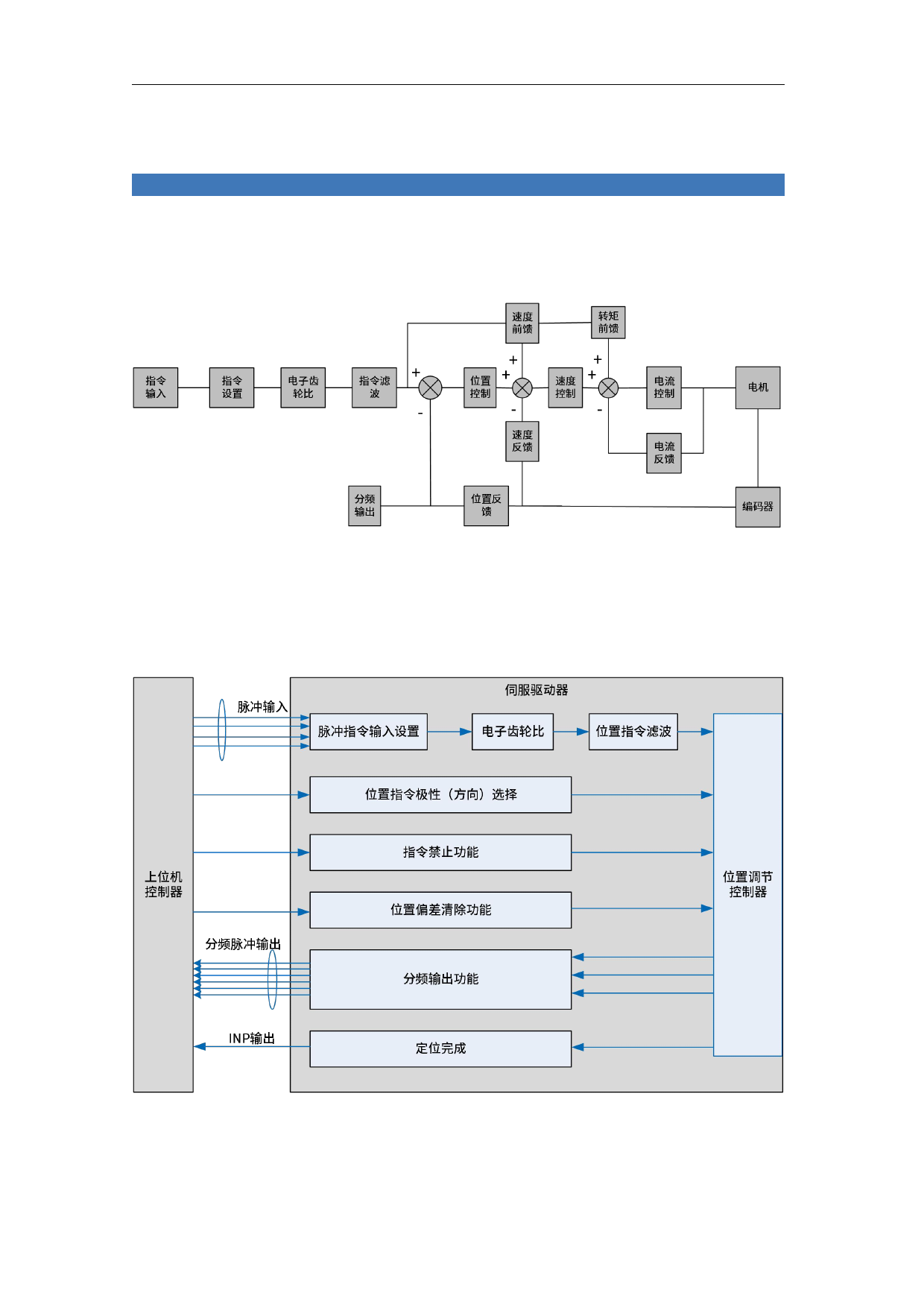
第六章 控制模式概要
6.1 位置控制
概述
位置模式一般是通过外部输入的脉冲的频率来确定转动速度的大小,通过脉冲的个数来确定
转动的角度,即移动的位移,主要通过运动控制器、控制卡、PLC 发送脉冲,控制器、控制卡
一般为 5V 脉冲,PLC 一般为 24V 脉冲。位置控制模式被应用于精密定位的场合。
请通过伺服驱动器面板或者雷赛驱动器调试软件将参数 PA0.01 设置为 0,伺服驱动器将工作
于位置控制模式。
请按照机械结构和指标设定伺服参数,以下说明为位置控制时的基本参数设定。
188
"
Do you need help?
Call Me Back

 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")