
第四章 显示与操作
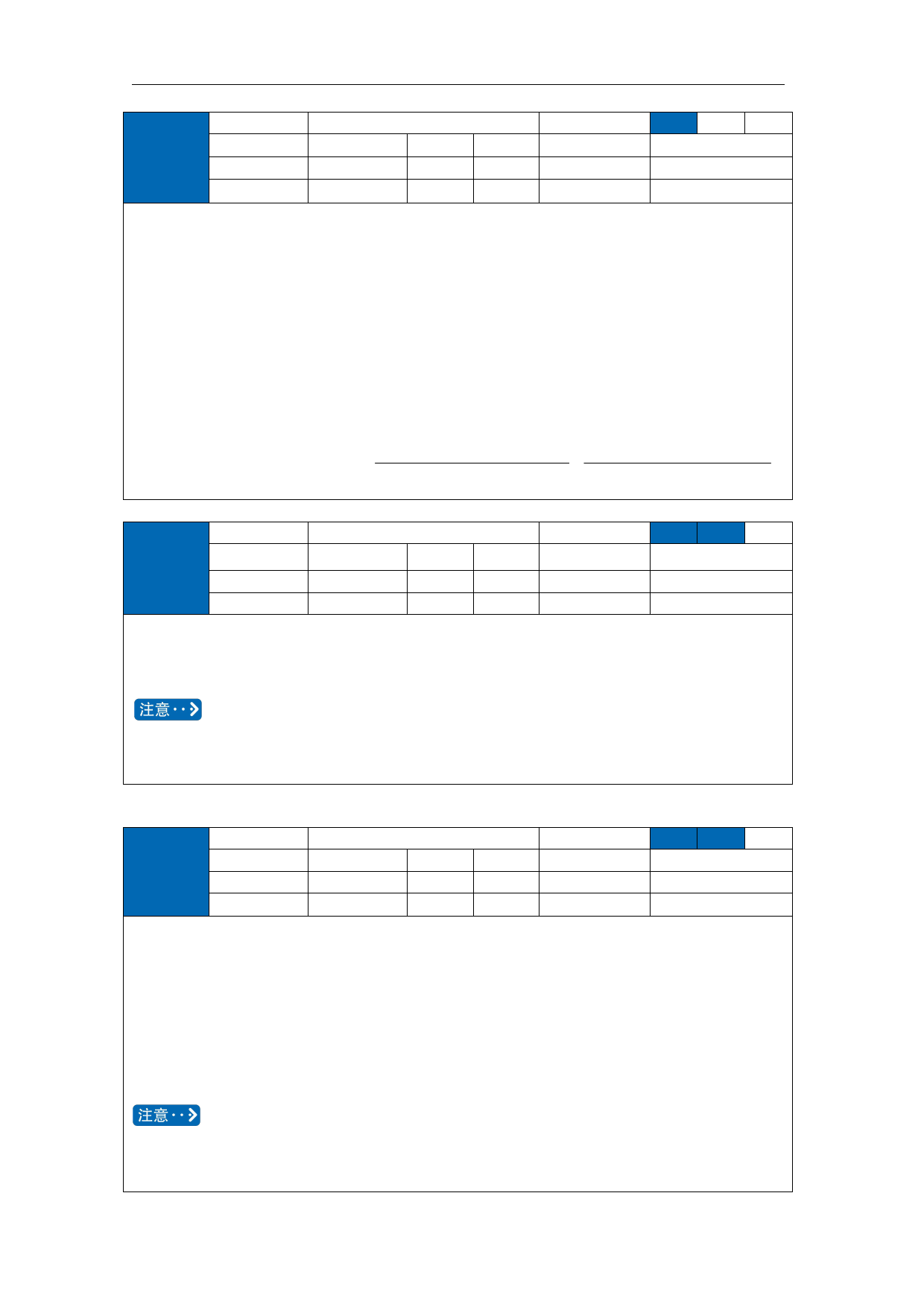
PA1.11
参数名称 速度前馈滤波器时间常数
有效模式
P
设定范围 0~6400
单位 0.01ms 标准出厂设定 50
数据长度 16bit
属性 R/W 485 地址
0x0117
生效方式 立即
设定速度前馈输入所需的一次延迟滤波器的时间常数。低通滤波器,消除速度前
馈指令中含的突变或高频成分。一般在位置指令分辨率较低或电子齿轮比比较大
时使用,使前馈变得更加平滑。
减小该值,可抑制加减速时的速度过冲;增大该值,可抑制位置指令更新周期与
驱动器控制周期相比较长、位置指令的脉冲频率不均匀等情况下的噪音,抑制定
位完成信号的抖动。
<速度前馈的使用示例>
在速度前馈滤波器设定为 50(0.5ms)定值时,通过逐步提高速度前馈增益,而
逐渐加强前馈作用。在固定速度动作中的位置偏差,由于速度前馈增益的值变大,
用以下公式推论可知位置偏差可变小。
指令速度【指令单位/ s】
位置偏差[指令单位]= 位置环增益【1/s】
100
速度前馈增益【%】
100
PA1.12
参数名称 转矩前馈增益
有效模式
PS
设定范围 0~1000
单位 0.1% 标准出厂设定 0
数据长度 16bit
属性 R/W 485 地址
0x0119
生效方式 立即
·将根据速度指令微分计算得出的转矩指令乘以本参数设置的比率,跳过“速度
控制器”直接反馈加算至转矩指令输入中。
·使用转矩前馈时,需正确设定惯量比。请将从机械设备中所计算或惯量识别出
的惯量比设定为 PA0.04「惯量比」。
·提高转矩前馈增益,由于可将固定加减速时的位置偏差接近 0,所以在扰动转
矩不工作的理想条件下,在梯形速度模式下驱动时,可以在整个动作区间使位
置偏差大致接近于 0。
PA1.13
参数名称 转矩前馈滤波器时间常数
有效模式
PS
设定范围 0~6400
单位 0.01ms 标准出厂设定 0
数据长度 16bit
属性 R/W 485 地址
0x011B
生效方式 立即
设定转矩前馈输入所需的一次延迟滤波器的时间常数。低通滤波器,消除转矩前
馈指令中含的突变或高频成分。一般在速度指令比较粗糙或编码器分辨率比较低
或精度差时使用。
<转矩前馈的使用示例>
・ 在转矩前馈滤波器时间常数设定为 50(0.5 ms)程度的状态下,通过逐步提
高转矩前馈增益,而使转矩前馈变为有效。
・ 提高转矩前馈增益,因为一定加减速时的位置偏差可以接近 0,所以在没有干
扰转矩的理想条件下,在梯形速度模型下驱动时,可以在整个动作区间,使位
置偏差接近于 0。
实际上扰动转矩肯定存在,因此位置偏差不可能完全变为 0。
此外,与速度前馈相同,如果将转矩前馈滤波器的时间常数变大,则噪音变小,
但加速度变化点的位置偏差变大。
140
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")
 雷赛智能 Leadshine L7P 系列交流伺服系统使用手册 v1.1 202303 2731043699933271")