
CHAPTER 2 WIRING
Parameter setting
If the torque limit signal is assigned to a sequence input terminal, specify the corresponding value
("19" or "20") to the input terminal function setting parameter.
If the torque limit signal is not assigned to the sequence input terminal, the settings of PA1_27
2
(forward rotation torque limit) and PA1_28 (reverse rotation torque limit) are always enabled.
Relevant description
(1) Torque limit detection signal
This signal is turned on while the output torque of the servomotor is equal to or larger than the
torque limit.
The torque limit detection output is enabled in all control modes.
To assign the torque limit detection to a sequence output terminal, specify the corresponding
value ("26") to the output terminal function setting parameter.
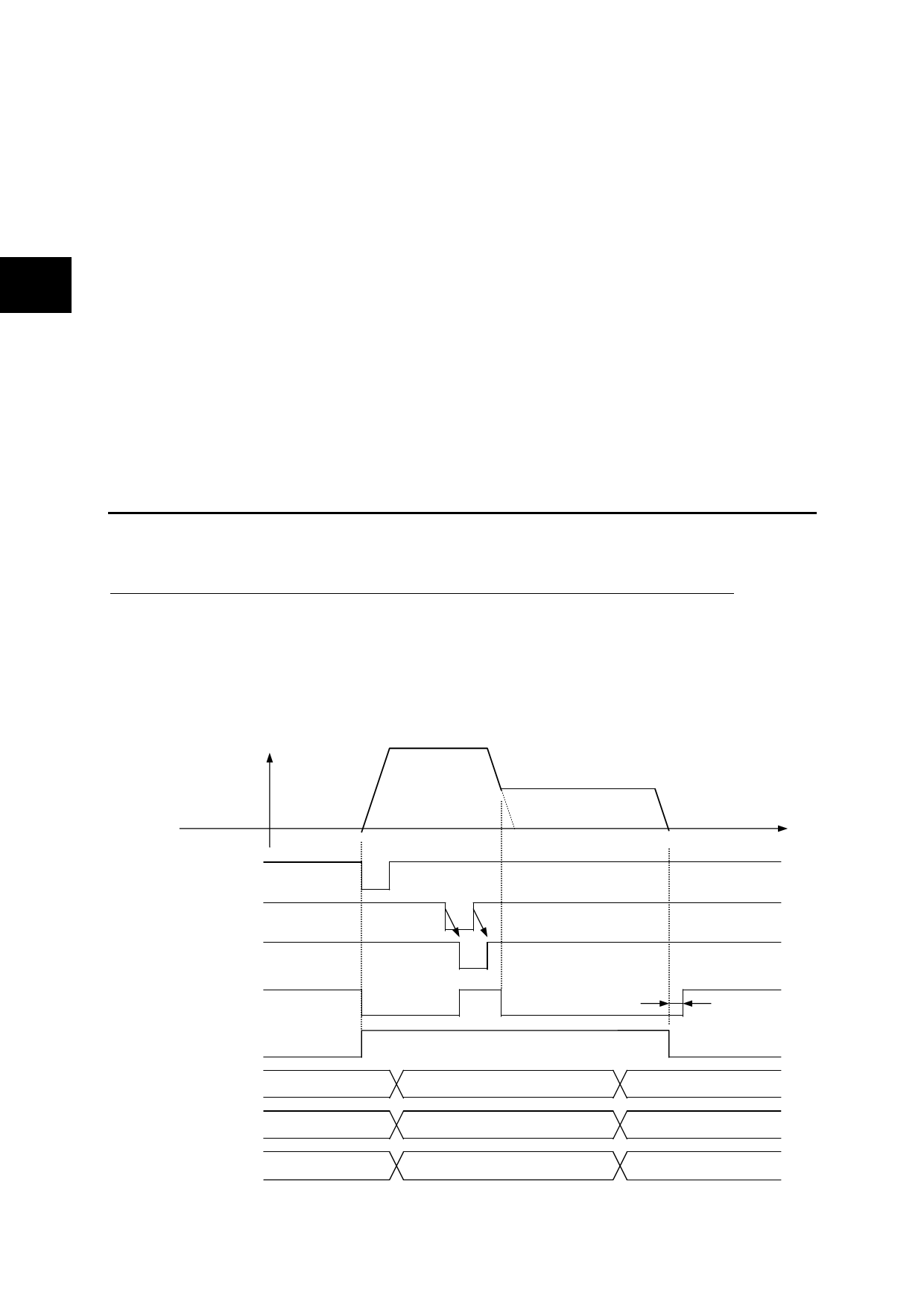
Immediate value continuation: Sequence input signal (Reference value 22)
Positioning motion can be continued according to the next data from the target position (speed) started
in the immediate value mode.
This function is enabled only if “7” (positioning operation) is selected for parameter PA1 01.
Function
After immediate value operation starts with the first data, supply desired data in an immediate
value continuation command. Operation continues with the next data, following execution of the
first data.
Rotaion speed
Start positioning
Immediate value
continuation
Immediate value
continuation
completion
Immediate value
continuation
permission
In-position (level)
OFF
OFF
OFF
OFF
ON
(Initial startup position) (Position to be continued) Time
ON
OFF
50 ms
(Permitted again after data continuation)
Command position (Initial startup position)
(Position to be continued)
Command speed (Initial startup speed)
(Speed to be continued)
ABS/INC
(ABS/INC)
(ABS/INC)
2-36 Description of I/O Signals
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")