
CHAPTER 2 WIRING
Gain swtich: Sequence input signal (Reference value 17)
To switch the gain (response capability) of the servo system.
Function
When PA1_61 (gain changing factor) is set at "3" (external switch: CONT signal), the CONT signal
2
assigned to this function switches the gain of the servo system.
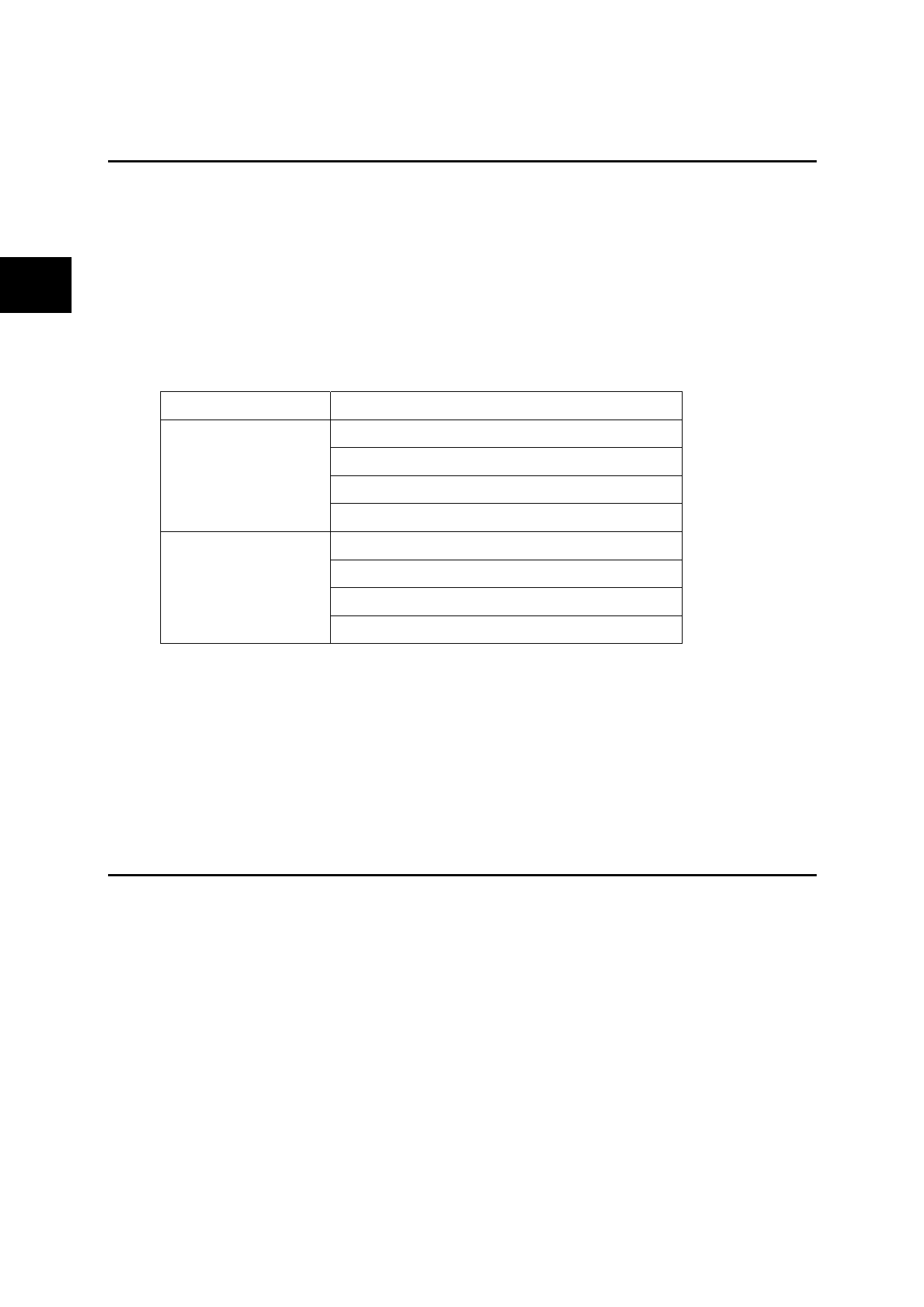
The control gain parameters that are enabled with the gain switch are listed in the table below.
Use the function to change the gain of the servo system between the going path and returning
path in a reciprocal motion or similar.
Gain switch
OFF
ON
Control gain
PA1_55: Position loop gain 1
PA1_56: Speed loop gain 1
PA1_57: Speed loop integration time constant 1
PA1_58: Feed forward gain 1
PA1_64: Position loop gain 2
PA1_65: Speed loop gain 2
PA1_66: Speed loop integration time constant 2
PA1_67: Feed forward gain 2
Parameter setting
To assign gain switch to a sequence input terminal, specify the corresponding value ("17") to the
input terminal function setting parameter.
Torque limit 0: Sequence input signal (Reference value 19)
Torque limit 1: Sequence input signal (Reference value 20)
Limitations are set on the output torque of the servomotor.
Function
Limitation on the output torque of the servomotor by turning on the torque limit signal can be set.
Specify the torque limit in increments of 1% in the range from "0" to the maximum output torque.
The maximum output torque is 300% if the rated torque is 100%.
The torque limit function is always enabled in all control modes.
Note that the setting of PA1_37 to 40 (acceleration and deceleration time) may be ineffective if the
output torque is limited during acceleration or deceleration. The enabled torque limit is as follows.
2-34 Description of I/O Signals
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")