
CHAPTER 2 WIRING
Homing [ORG]: Sequence input signal (Reference value 5)
Homing position LS [LS]: Sequence input signal (Reference value 6)
A homing motion is executed and the home position is determined.
These functions are enabled only if the extension mode (parameter PA1_01= 6) and the positioning
2
operation (parameter PA1_01=7) are selected.
Function
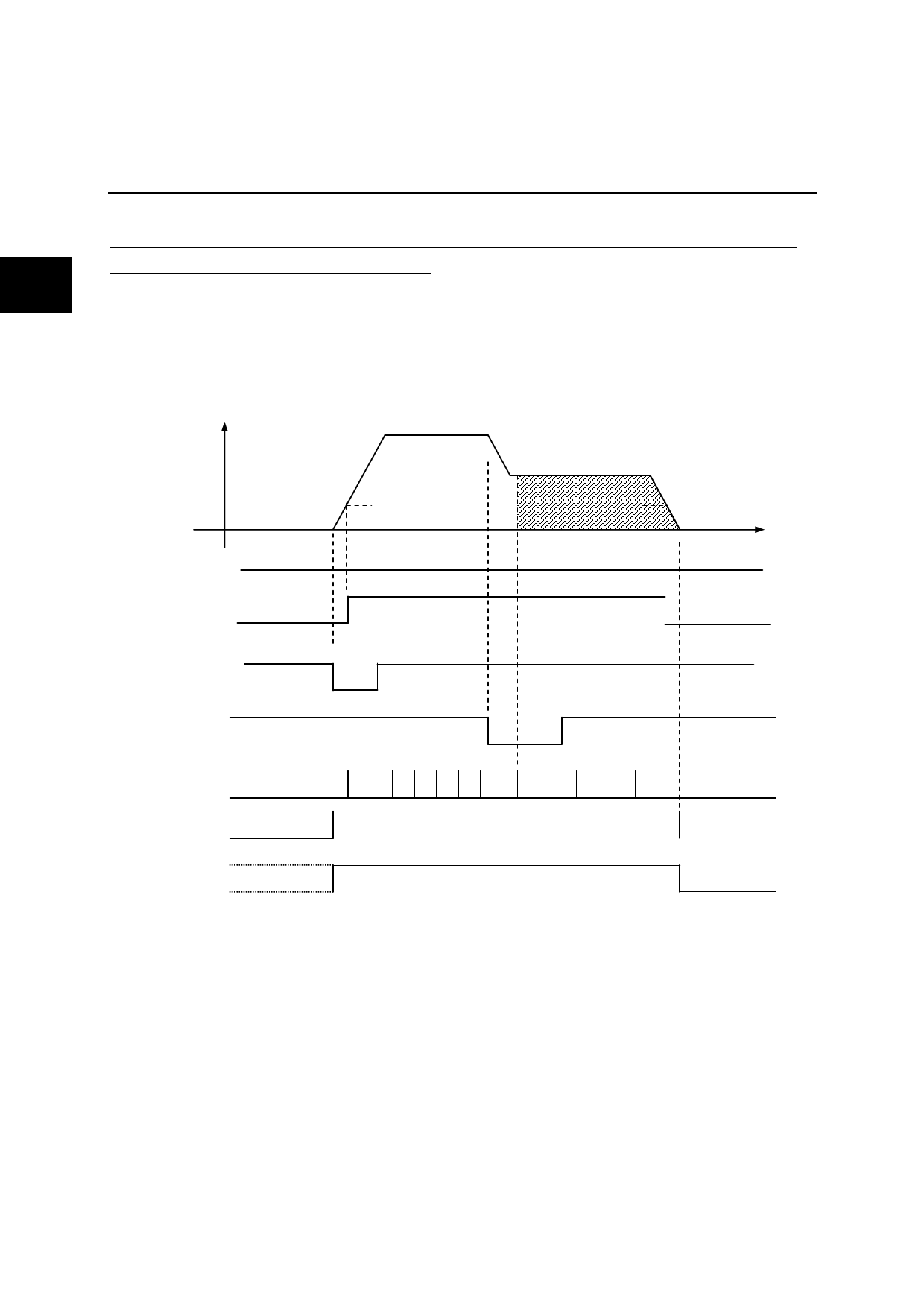
The rising edge of the homing signal starts a homing motion. The homing motion follows the
settings of PA2_06 through PA2_18. If parameters are factory shipment settings, the following
motion is executed.
Speed
[RDY]
ON
Zero speed
ON
OFF
Homing [ORG]
OFF
ON
Home position
OFF
ON
LS [LS]
Motor Z-phase
detection
In-position
ON
[INP]
OFF
ON
Homing
completion
ON/OFF
OFF
ON
(1) After checking that the in-position signal is turned on, turn on the homing command.
(2) Once the in-position signal is turned off, you can turn off the homing command.
The motor rotates in the direction of PA2_10 (homing direction after reference signal detection) at a
speed of PA2_06 (homing speed).
(3) When the home position LS signal is turned on, the speed changes to creep speed for homing
(PA2_07).
(4) The motor moves the home position shift unit amount (PA2_14) from the first Z-phase after the
rising (or trailing) edge of the home position LS, and then it is stopped.
(5) The in-position signal is turned on with the stopping position being home position after homing
completion PA2_16. In addition, the homing completion signal is turned on.
2-26 Description of I/O Signals
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")