
CHAPTER 2 WIRING
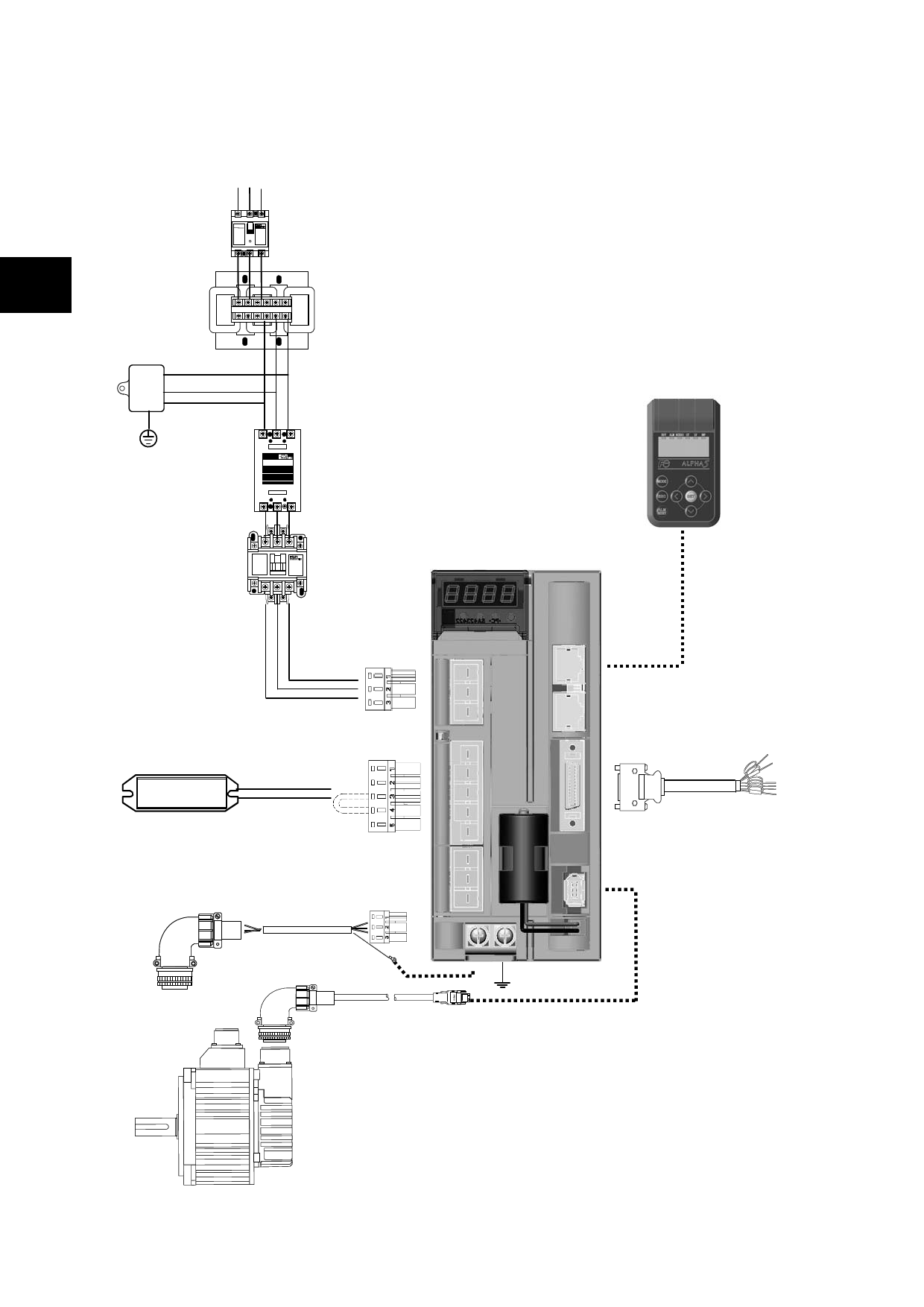
2) Connecting to peripheral devices (Servo amplifier frames 2, 3 and 4)
For the motors with the Cannon connector, connect cables as shown below.
MCCB/ELCB
2
Surge
absorber
AC reactor
Servo Operator (optional)
Using this, parameter
copying and editing can be
performed.
Power filter
Electromagnetic
contactor
(L1, L2, L3)
TB1
TB2 (Provided with body)
External regenerative resistor
(Disconnect the jumper wire and
connect across pins 2 and 3.)
Motor power cable
(Should be fabricated by the customer.)
TB3
Servomotor
Servo amplifier
CN3A
RS-485
CN3B communications
Sequence I/O
CN1 cable
Connect pushbuttons,
various sensors, and
pulse input/output
signals.
Grounding
terminal (M4)
Encoder cable
CN2
2-8 Configuration
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")