
CHAPTER 2 WIRING
2.1.3.2 Pulse Output (FFA, *FFA, FFB, *FFB, FFZ, *FFZ)
The pulses proportional to the motor revolutions are output as A/B phase pulse.
The number of output pulses per motor revolution can be specified in the parameter (PA1_08).
The output pulse frequency is proportionate to axis revolution speed. Although the output
frequency is not limited, it has to be 500 kHz or lower considering the electrical limit of the output
circuit.
The output pulse phase (A or B phase advance) to the motor revolution direction can be specified
2
in the parameter (PA1_11).
The FFZ and *FFZ signals output one pulse per motor revolution. The output position can be
adjusted in the parameter (PA1_12).
In the case of GYB motor at speed of 100r/min or less after the power turned on the output of first
Z phase will happen within 1 rotation after the motor becomes over 12-degree as worst.
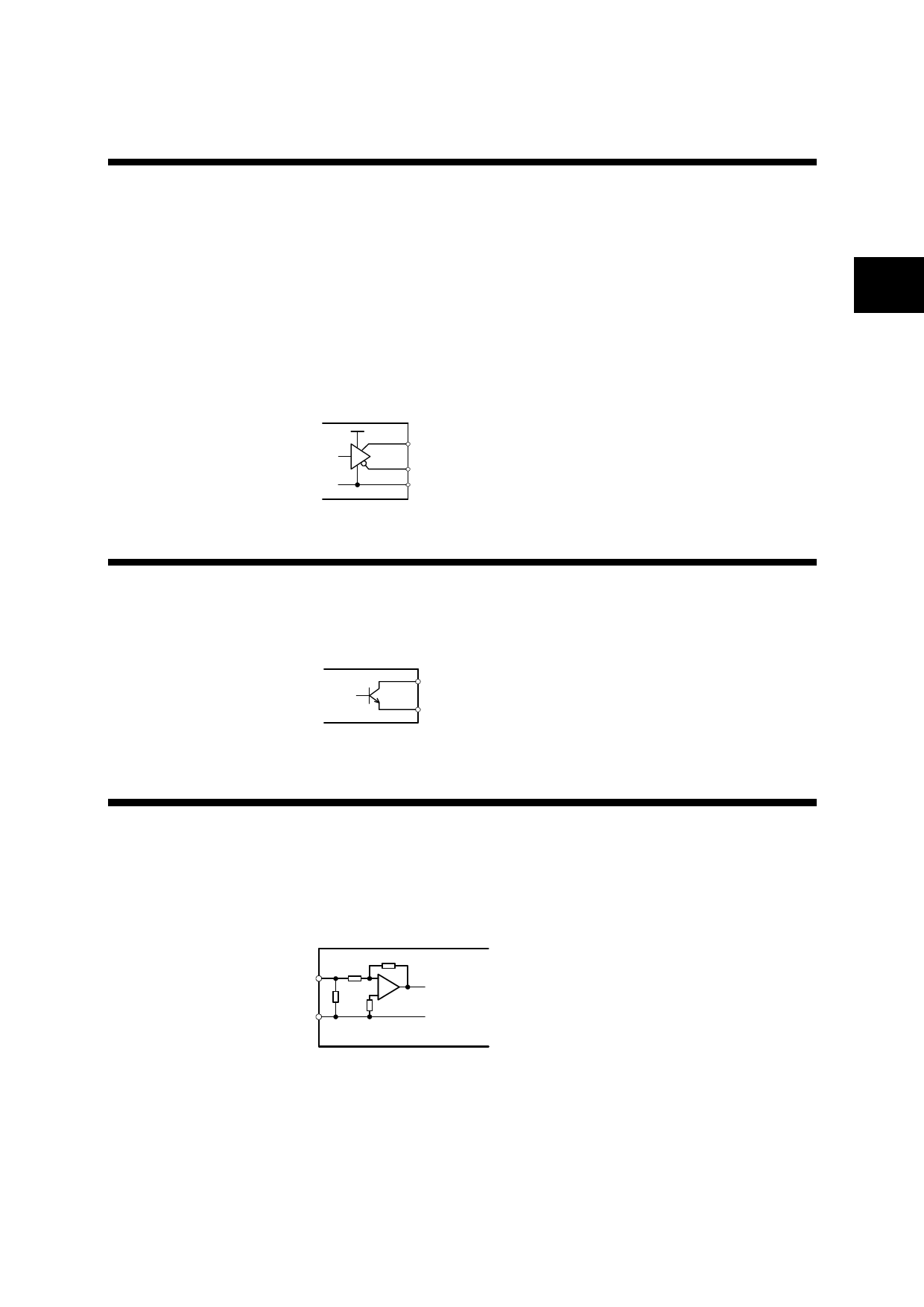
5 V
AM26LS31
FFA,(FFB),(FFZ)
*FFA,(*FFB),(*FFZ)
0 VServo amplifier M5
2.1.3.3 Z-Phase Output (FZ, M5)
The Z-phase output is an open collector output of the FFZ or *FFZ signal.
The current can flow up to 30 VDC/50 mA.
2SC2712 or
equivalent
FZ
Servo amplifier M5
2.1.3.4 Analog Input (VREF(TREF),M5)
The analog input is the terminal used when performing the speed/torque control by analog commands.
Input voltage: 0 to ±10 VDC
Variable resistor: 1 to 5 kΩ (1/2 W)
Input impedance: 20 kΩ
VREF(TREF)
22k
220k
M5
Servo amplifier
Configuration 2-13
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")
 Fuji Alpha5 Smart Servo Motor and Driver System User Manual")