
4. Indexing Position Operation
4.2
Index Type
L7P drive supports the 11 index types below for the Indexing Position mode.
4.2.1 Absolute / Relative Move
This is the most basic Point-to-Point (PTP) operation method where the motor rotates to the
absolute or relative position based on the set speed and acceleration.
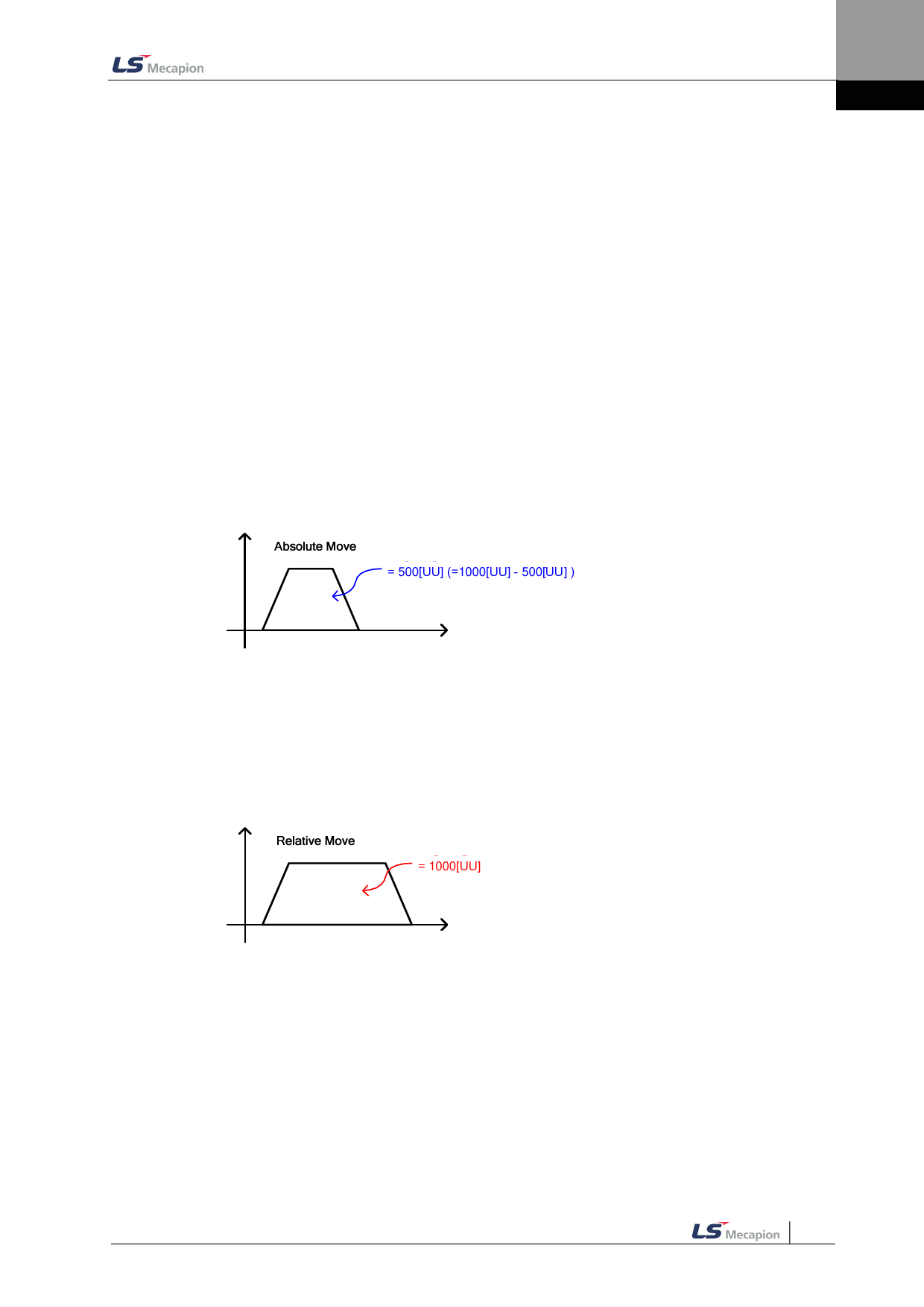
Absolute Move
The final distance is the difference between the distance and the current position.
Example) Absolute move when current position = 500 and Distance = 1000
Sspeed
Final travel distance
time
Relative Move
The final distance is the input value of the distance.
Example) Relative move when current position = 500 and Distance = 1000
Speed
Final travel distance
time
4-17
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")