
3. L7P Indexer Overview
3.3
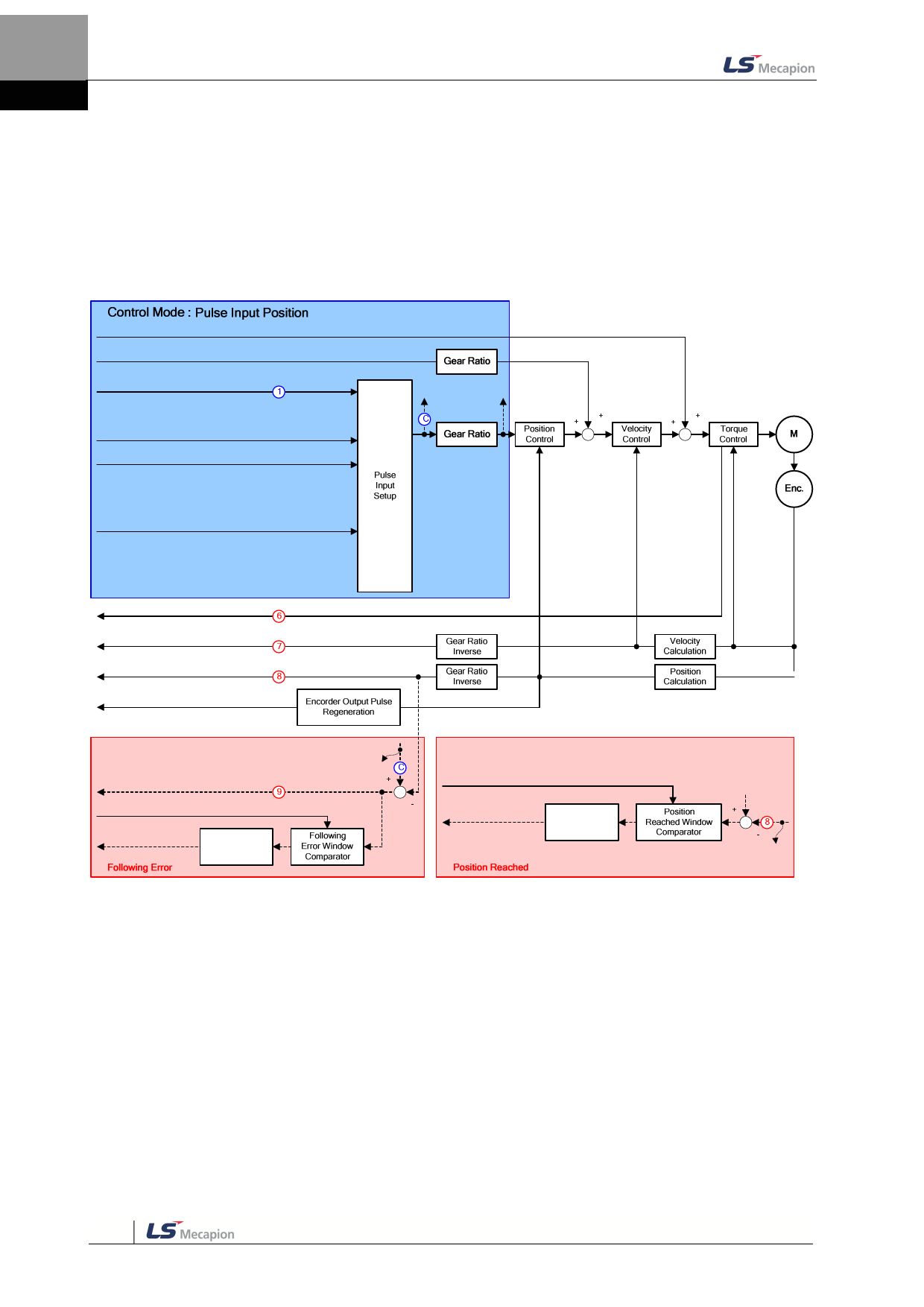
Pulse Input Position Operation
L7P Servodrive provides a mode that determines position using pulse traininputs from
external controller. To use the pulse input position control mode, set the control mode
(0x3000) to ‘pulse input position control mode.’
The following is the block diagram for the pulse input position mode.
Torque Offset (0x60B2)
Velocity Offset (0x60B1)
Pulse Input ( PF+/PF- , PR+/PR- )
Pulse Input Logic (0x3003)
Pulse Input Filter (0x3004)
Position Demand Position Demand Internal
Value (0x6062) Value (0x60FC)
Control Mode (0x3000)
Torque Actual Value (0x6077)
Velocity Actual Value (0x606C)
Position Actual Value (0x6064)
Pulse Output (A/B/Z Phase)
Following Error Actual Value (0x60F4)
Following Error Window (0x6065)
Following Error in
Statusword (0x6041.13)
Following
Error TimeOut
(0x6066)
Position Demand
Value (0x6062)
Position Actual Internal
Value (0x6063)
Position Window (0x6067)
Target Reached in
Statusword (0x6041.10)
Position
WindowTime
(0x6068)
Trajectory
Generator
ePosition
Position Actual
Value (0x6064)
3-10
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")