
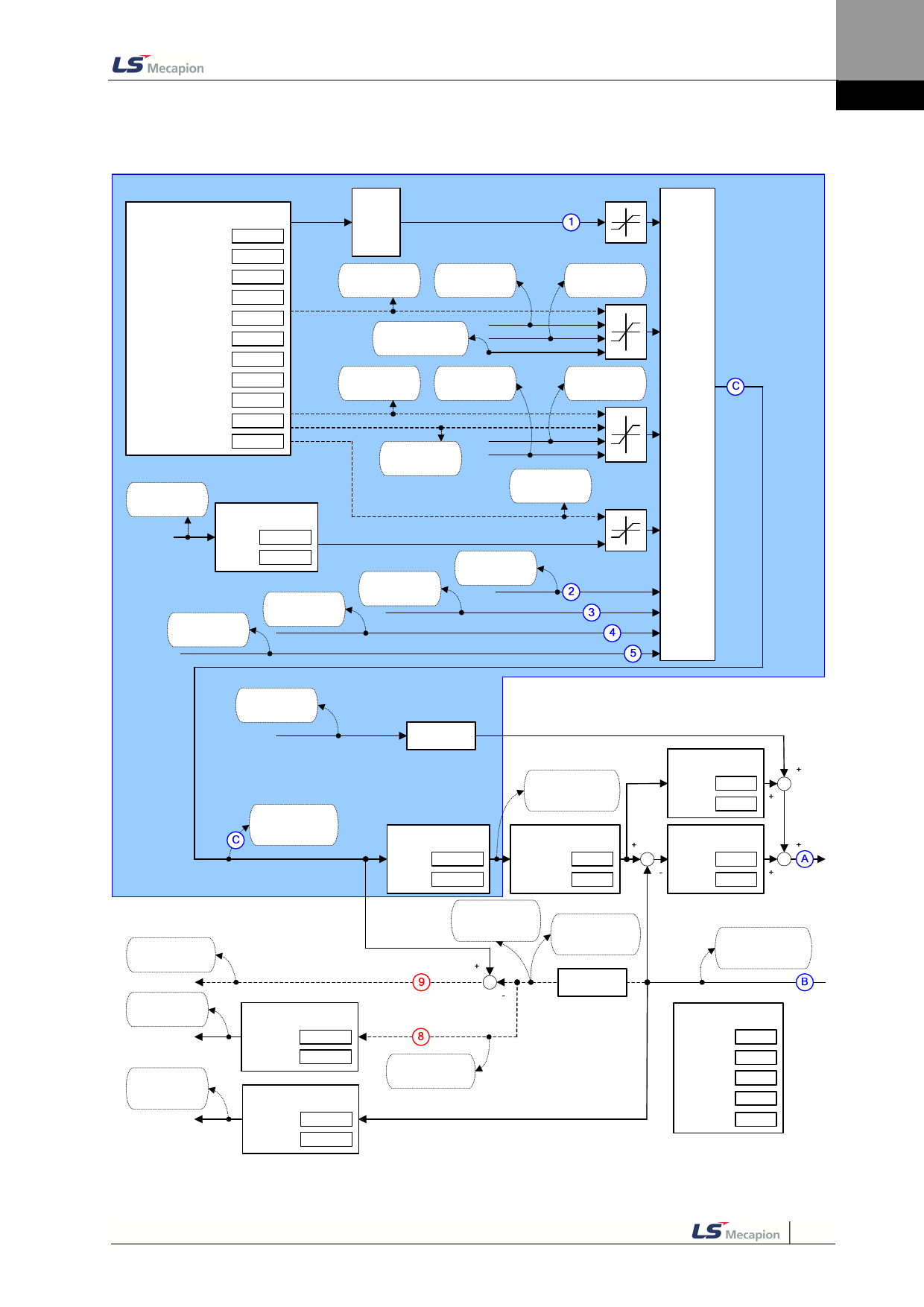
3. L7P Indexer Overview
Internal Blocks of Indexing Positon Mode
Index 00
IndexType 0x3100:01
Distance 0x3100:02
Velocity 0x3100:03
Acceleraton 0x3100:04
Deceleration 0x3100:05
Registration Distance 0x3100:06
Registration Velocity 0x3100:07
Repeat Count 0x3100:08
Dwell Time 0x3100:09
Next Index 0x3100:0A
Action 0x3100:0B
Analog Input2
12bit A/D
A-OVR
Analog Velocity Override
Mode 0x221E
Offset 0x221F
0x3007
Start Index
Number(0~63)
0x3000
Control Mode
Load
Indexing
Buffer
( Index
00~63 )
Index 00~63
Distance
[UU]
0x607D:01
Min. Position
Limit [UU]
0x2400
Software Position
Limit Function Select
Index 00~63
Acceleration
[UU/s^2]
0x605A
Quick Stop
Option Code
0x607D:02
Max. Position
Limit [UU]
0x6085
Quick Stop Dec.
[UU/s^2]
Index 00~63
Deceleration
[UU/s^2]
Index 00~63
Velocity
[UU/s]
0x3001
Coordinate Select
0x240C
Modulo Factor
Trajectory
Generator
0x60B1
Velocity Offset
[UU/s]
0x6062
Position Demand
Value [UU]
0x60F4
Following Error
Actual Value [UU]
0x6040.10
Position Reached
in Statuswor
Pulse Output
A phase
B phase
Z phase
Position Reached Window
Comparator
Position
Window
0x6067
TimeOut
0x6066
Encoder Output Pulse
Regeneration
OutPulse
0x3006
Output
Mode
0x3007
Gear Ratio
0x60FC
Position Demand
Internal Value [pulse]
Gear Ratio
Motor
Shaft
0x6091:01
0x6091:02
Smoothing
Position Command Filter
Filter Time 0x2109
Average
Filter Time
0x210A
0x60BA or 0x60BC
Touch Probe 1/2
Positive Edge
Position Value[UU]
0x60BB or 0x60BD
Touch Probe 1/2
Negative Edge
Position Value[UU]
Gear Ratio
Inverse
0x6064
Position Actual
Value [UU]
Velocity
Feed-Forward
Gain 0x210C
Filter 0x210D
Position Control
P Gain
Gain 1 0x2101
Gain 2 0x2105
0x6063
Position Internal
Actual Value [pulse]
Gain Conversion
Mode
Time1
Time2
Waiting
Time1
Waiting
Time2
0x2119
0x211A
0x211B
0x211C
0x211D
3-5
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")