
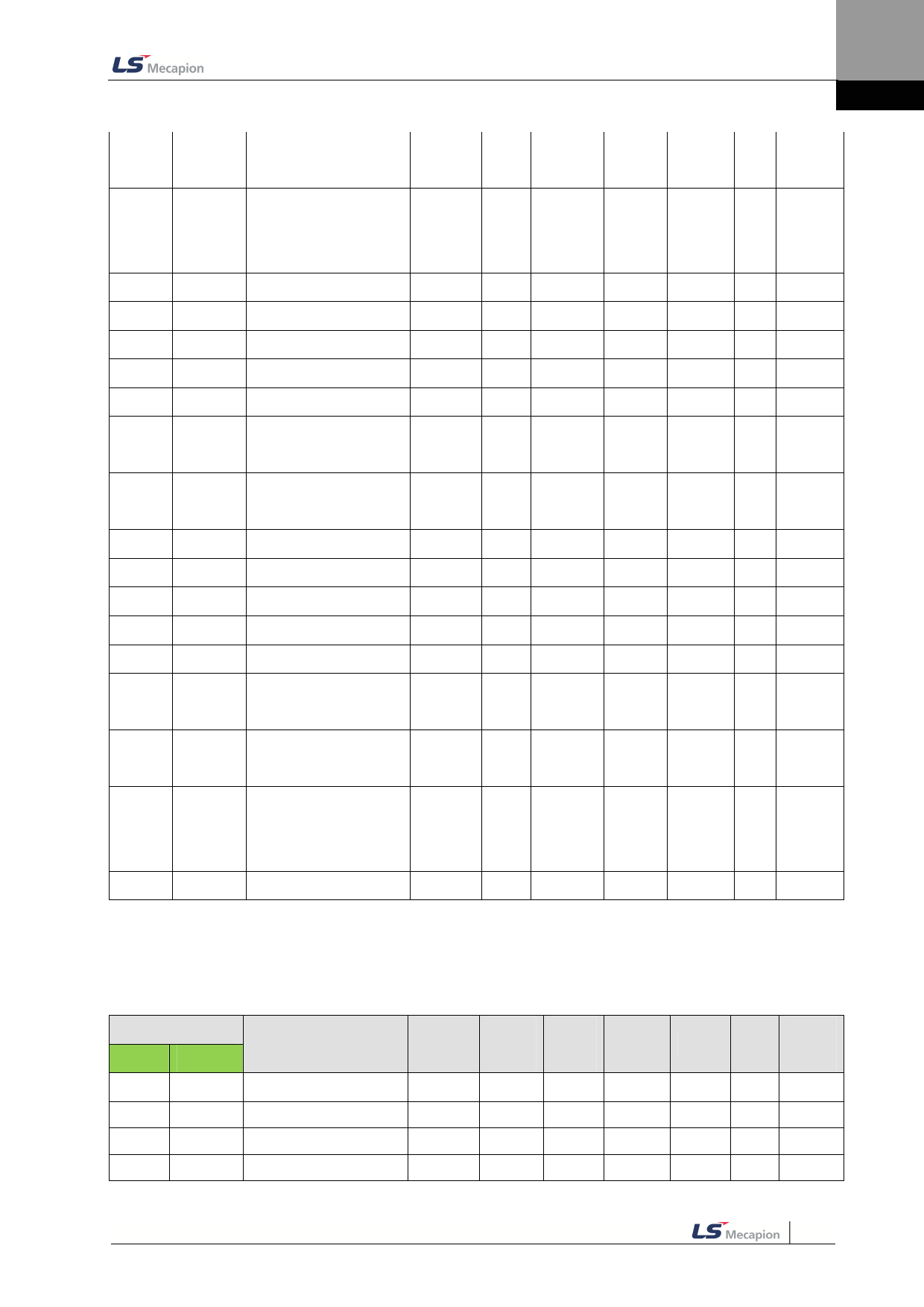
15. Communication Protocol
24647
24648
24649
24650
24651
24653
24655
24657
24666
24667
24668
24670
24672
24676
24678
24680
24682
214748364
8
8
0x6047
Speed Offset
0x60B1
DINT
-
214748364
0
214748364
UU/s
RW
8
8
0x6049
Torque Offset
0x60B2
INT
0
-5000
5000
0.1%
RW
0x604A
Touch Probe Function
0x60B8
UINT
0x0033
0
0xFFFF
-
RW
0x604B
Touch Probe Status
0x60B9
UINT
-
0x604C
Touch Prove 1 Positive Edge Position
Value
0x60BA
DINT
-
0x604E
Touch Prove 1 Negative Edge Position
Value
0x60BB
DINT
-
Touch Prove 2 Positive Edge Position
0x6050
0x60BC
DINT
-
Value
-
-
-
RO
-
-
UU
RO
-
-
UU
RO
-
-
UU
RO
Touch Prove 2 Negative Edge Position
0x6052
0x60BD
DINT
-
Value
-
-
UU
RO
0x605A
Positive Torque Limit Value
0x60E0
UINT
1000
0
5000
0.1%
RW
0x605B
Negative Torque Limit Value
0x60E1
UINT
1000
0
5000
0.1%
RW
0x605C
Following Error Actual Value
0x60F4
DINT
-
-
-
UU
RO
0x605E
Position Demand Internal Value
0x60FC
DINT
-
-
-
Pulse
RO
0x6060
Digital Inputs
0x60FD
UDINT
-
-
-
-
RO
0x6064
Disital Outputs (Physical)
0x60FE
DINT
0
0xFFFFFFF
0
-
RW
F
0x6066
Disital Outputs (Bit mask)
0x60FE
DINT
0
0xFFFFFFF
0
-
RW
F
0x6068
Target Speed
0x60FF
DINT
-
214748364
0
214748364
UU/s
RW
8
8
0x606A
Supported Drive Modes
0x6502
UDINT 0x000003AD
-
-
-
RO
15.3.11 Index Related Parameters
communication address
decimal hexadecimal
12288
0x3000
12289
12290
0x3001
0x3002
12291
0x3003
parameter name
Control Mode
Coordinate Select
Baud Rate Select
Pulse Input Logic Select
parameter
Variable
Default
Min
No.
Format
Value
0x3000
UINT
0
0
0x3001
UINT
0
0
0x3002
UINT
0
0
0x3003
UINT
0
0
Accessibili
Max
Unit
ty
9
-
RW
1
-
RW
4
-
RW
5
-
RW
15-29
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")