
15. Communication Protocol
10247
10248
0x2807
0x2808
[Third Party Motor] Maximum Speed
[Third Party Motor] Inertia
0x2805
UINT
5000
1
0x2806
FP32
0.321
-
10250
0x280A
[Third Party Motor] Torque Constant
0x2807
FP32
0.46
-
10252
0x280C
[Third Party Motor] Phase Resistance
0x2808
FP32
0.82
-
10254
0x280E
[Third Party Motor] Phase Inductance
0x2809
FP32
3.66
0
10256
0x2810
[Third Party Motor] TN Curve Data 1
0x280A
UINT
3000
1
10258
0x2812
[Third Party Motor] TN Curve Data 2
0x280B
FP32
100
-
10260
0x2814
[Third Party Motor] Hall Offset
0x280C
UINT
0
0
60000
rpm
RW
-
Kg
RW
Kg.m2.10
-
RW
-4
-
ohm
RW
1000
Mh
RW
60000
rpm
RW
-
%
RW
360
deg
RW
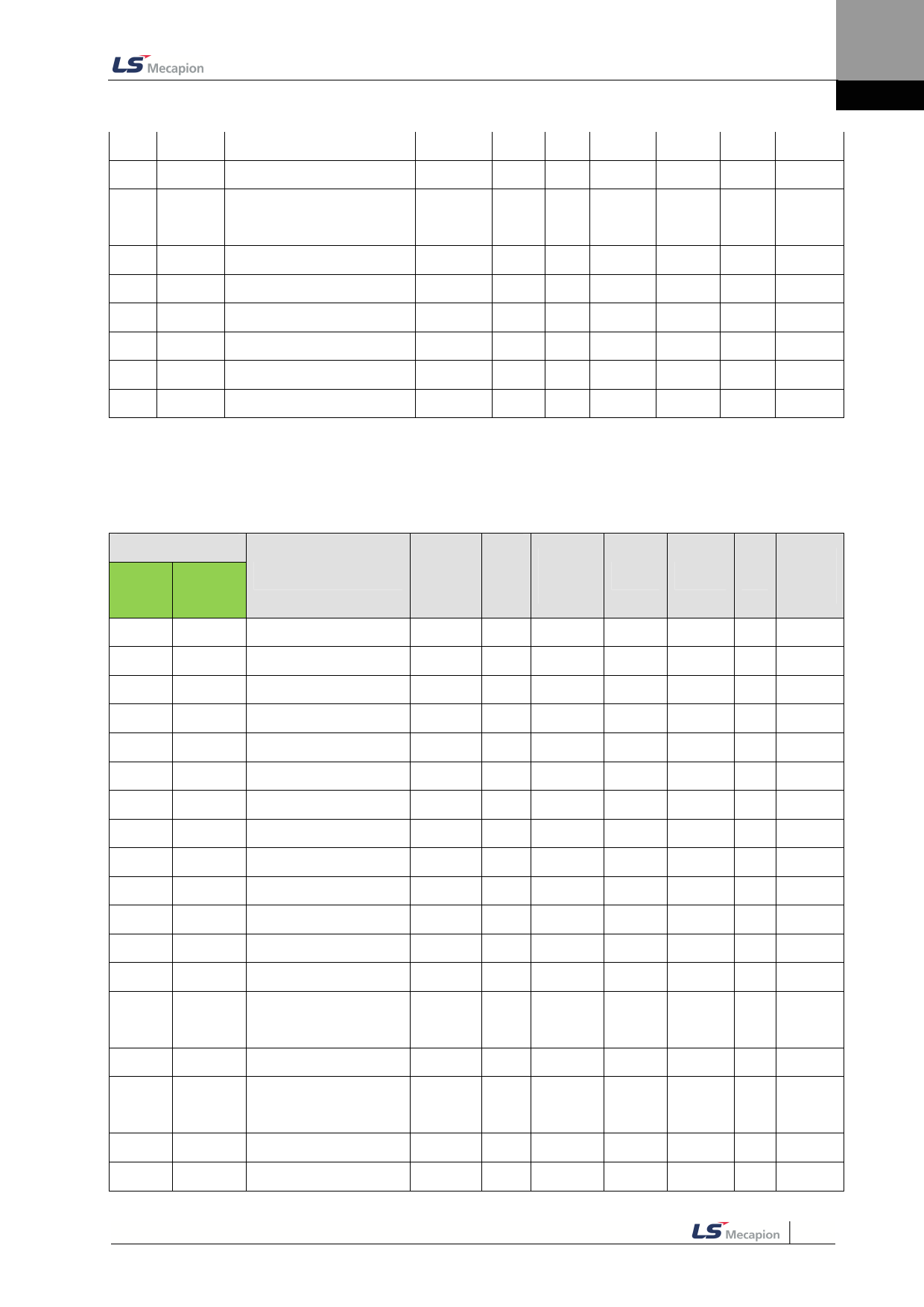
15.3.10 CiA402 parameters
communication address
decimal hexadecimal
parameter name
24576
24577
24578
24579
24580
24581
24582
24583
24584
24585
24586
24588
24590
0x6000
0x6001
0x6002
0x6003
0x6004
0x6005
0x6006
0x6007
0x6008
0x6009
0x600A
0x600C
0x600E
Error Code
Controlword
Statusword
Quick Stop Option Code
Shutdown Option Code
Disable Operation Option Code
Halt Option Code
Fault Reaction Option Coed
Modes of Operation
Modes of Operation Display
Position Demand Valude
Position Actual Internal Value
Position Actual Value
parameter
No.
Variabl
e
Format
0x603F
UINT
0x6040
UINT
0x6041
UINT
0x605A
INT
0x605B
INT
0x605C
INT
0x605D
INT
0x605E
INT
0x6060
SINT
0x6061
SINT
0x6062
DINT
0x6063
DINT
0x6064
DINT
Default
Value
0
0
-
2
0
1
0
0
0
-
-
-
-
24592
0x6010
Following Error Window
0x6065
UDINT
600000
24594
0x6012
Following Error Timeout
0x6066
UINT
0
24595
0x6013
Position Window
0x6067
UDINT
100
24597
24598
0x6015
0x6016
Position Window Time
Speed Demand Value
0x6068
UINT
0
0x606B
DINT
-
Accessibilit
Min
Max
Unit
y
-
-
-
RO
0
65535
-
RW
-
-
-
RO
0
4
-
RW
1
1
-
RW
0
1
-
RW
0
4
-
RW
0
0
-
RW
0
10
-
RW
-
-
-
RO
-
-
UU
RO
-
-
Pulse
RO
-
-
UU
RO
107374182
0
UU
RW
3
0
65535
ms
RW
107374182
0
UU
RW
3
0-
65535
ms
RW
-
-
UU/s
RO
15-27
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")