
12. Communication Protocol
9745
9746
9747
9748
9751
9752
9755
9756
9757
0x2611
0x2612
0x2613
0x2614
0x2617
0x2618
0x261B
0x261C
0x261D
Motor Rated Speed
Motor Maximum Speed
Drive Rated Current
FPGA Version
Hall Signal Display
Bootloader Version
Warning Code
Analog Input 1 Value
Analog Input 2 Value
0x260E
UINT
-
-
0x260F
UINT
-
-
0x2610
UINT
-
-
0x2611
STRING
-
-
0x2612
UINT
-
-
0x2613
STRING
-
-
0x2614
UINT
-
-
0x2615
INT
-
-
0x2616
INT
-
-
-
rpm
RO
-
rpm
RO
-
0.1A
RO
-
-
RO
-
-
RO
-
-
RO
-
-
RO
-
mV
RO
-
mV
RO
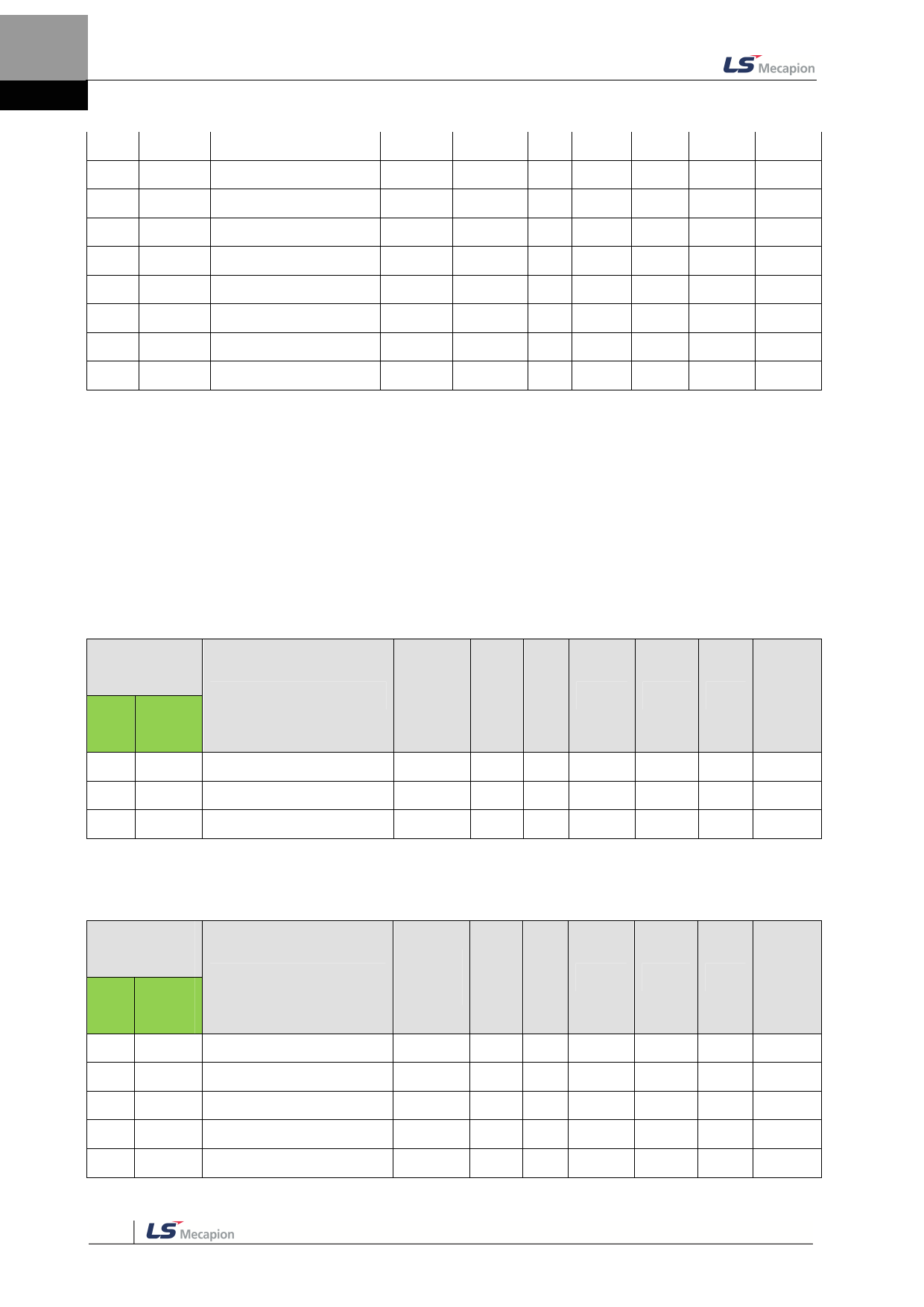
15.3.8 Procedures and Alarm History
communication
address
decima hexadecim
l
al
9984
0x2700
9985
0x2701
parameter name
Procedure Command Code
Procedure Command Argument
Defaul
parameter
Variable
t
Min
No.
Format
Value
0x2700
UINT
0
0
0x2701
UINT
0
0
Accessibilit
Max
Unit
y
0xFFFF
-
RW
0xFFFF
-
RW
15.3.9 3rd Party Motor Parameters
communication
address
decima hexadecim
l
al
parameter name
Defaul
parameter Variable
t
Min
No.
Format
Value
10240
0x2800
[Third Party Motor] Type
0x2800
UINT
0
0
10241
0x2801
[Third Party Motor] Number of Poles
0x2801
UINT
8
2
10242
0x2802
[Third Party Motor] Rated Current
0x2802
FP32
2.89
-
10244
0x2804
[Third Party Motor] Maximum Current
0x2803
FP32
8.67
-
10246
0x2806
[Third Party Motor] Rated Speed
0x2804
UINT
3000
1
Accessibilit
Max
Unit
y
1
-
RW
1000
-
RW
-
Arms
RW
-
Arms
RW
60000
rpm
RW
15-26
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")