
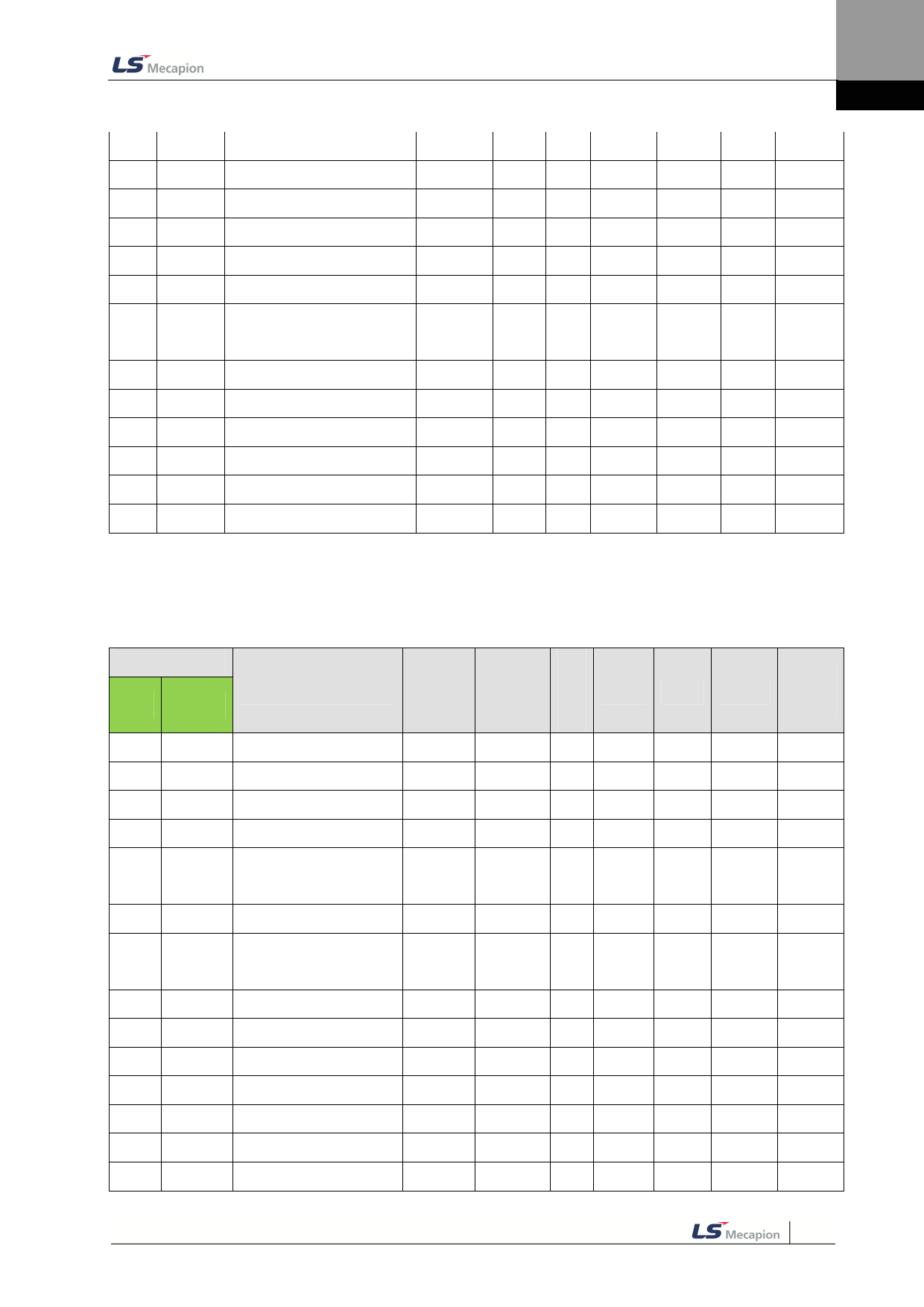
15. Communication Protocol
9485
0x250D
On-line Gain Tuning Mode
0x250D
UINT
0
0
9486
0x250E
System Rigidity for Gain Tuning
0x250E
UINT
5
1
9487
0x250F
On-line Gain Tuning Adaptation Speed
0x250F
UINT
1
1
9488
0x2510
Off-line Gain Tuning Direction
0x2510
UINT
0
0
9489
0x2511
Off-line Gain Tuning Distance
0x2511
UINT
5
1
9490
0x2512
Disturbance Observer Gain
0x2512
UINT
0
0
9491
0x2513
Disturbance Observer Filter Time
Constant
0x2513
UINT
10
0
9492
0x2514
Current Controller Gain
0x2514
UINT
100
1
9493
0x2515
Vibration Supression Filter Configuration
0x2515
UINT
0
0
9494
0x2516
Vibration Supression Filter 1 Frequency
0x2516
UINT
0
0
9495
0x2517
Vibration Supression Filter 1 Damping
0x2517
UINT
0
0
9496
0x2518
Vibration Supression Filter 2 Frequency
0x2518
UINT
0
0
9497
0x2519
Vibration Supression Filter 2 Damping
0x2519
UINT
0
0
1
-
RW
20
-
RW
5
-
RW
1
-
RW
10
-
RW
100
%
RW
1000
0.1ms
RW
150
%
RW
5
-
RW
2000
0.1Hz
RW
5
-
RW
2000
0.1Hz
RW
5
-
RW
15.3.7 Monitoring Parameters
communication address
decimal hexadecimal
parameter name
parameter
No.
9728
9729
9730
9732
9733
9734
9735
9736
9738
9739
9740
9742
9743
9744
0x2600
0x2601
0x2602
0x2604
0x2605
0x2606
0x2607
0x2608
0x260A
0x260B
0x260C
0x260E
0x260F
0x2610
Feedback Speed
Command Speed
Following Error
Accumulated Operation Overload
Instantaneous Maximum Operation
Overload
DC-Link Voltage
Accumulated Regeneration
Overload
SingleTurn Data
Mechanical Angle
Electrical Angle
MultiTurn Data
Drive Temperature 1
Drive Temperature 2
Encoder Temperature
0x2600
0x2601
0x2602
0x2603
0x2604
0x2605
0x2606
0x2607
0x2608
0x2609
0x260A
0x260B
0x260C
0x260D
Defau
Variable
lt
Min
Format
Value
INT
-
-
INT
-
-
DINT
-
-
INT
-
-
INT
-
-
UINT
-
-
INT
-
-
UDINT
-
-
UINT
-
-
INT
-
-
DINT
-
-
INT
-
-
INT
-
-
INT
-
-
Accessibili
Max
Unit
ty
-
rpm
RO
-
rpm
RO
-
pulse
RO
-
0.10%
RO
-
0.10%
RO
-
Volt
RO
-
0.10%
RO
-
pulse
RO
-
0.1deg
RO
-
0.1deg
RO
-
rev
RO
-
℃
RO
-
℃
RO
-
℃
RO
15-25
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")