
12. Communication Protocol
8459
8460
8461
8462
8463
8464
8465
8466
8467
8468
8469
8470
8471
8472
8473
8474
8475
8476
8477
8478
8479
8480
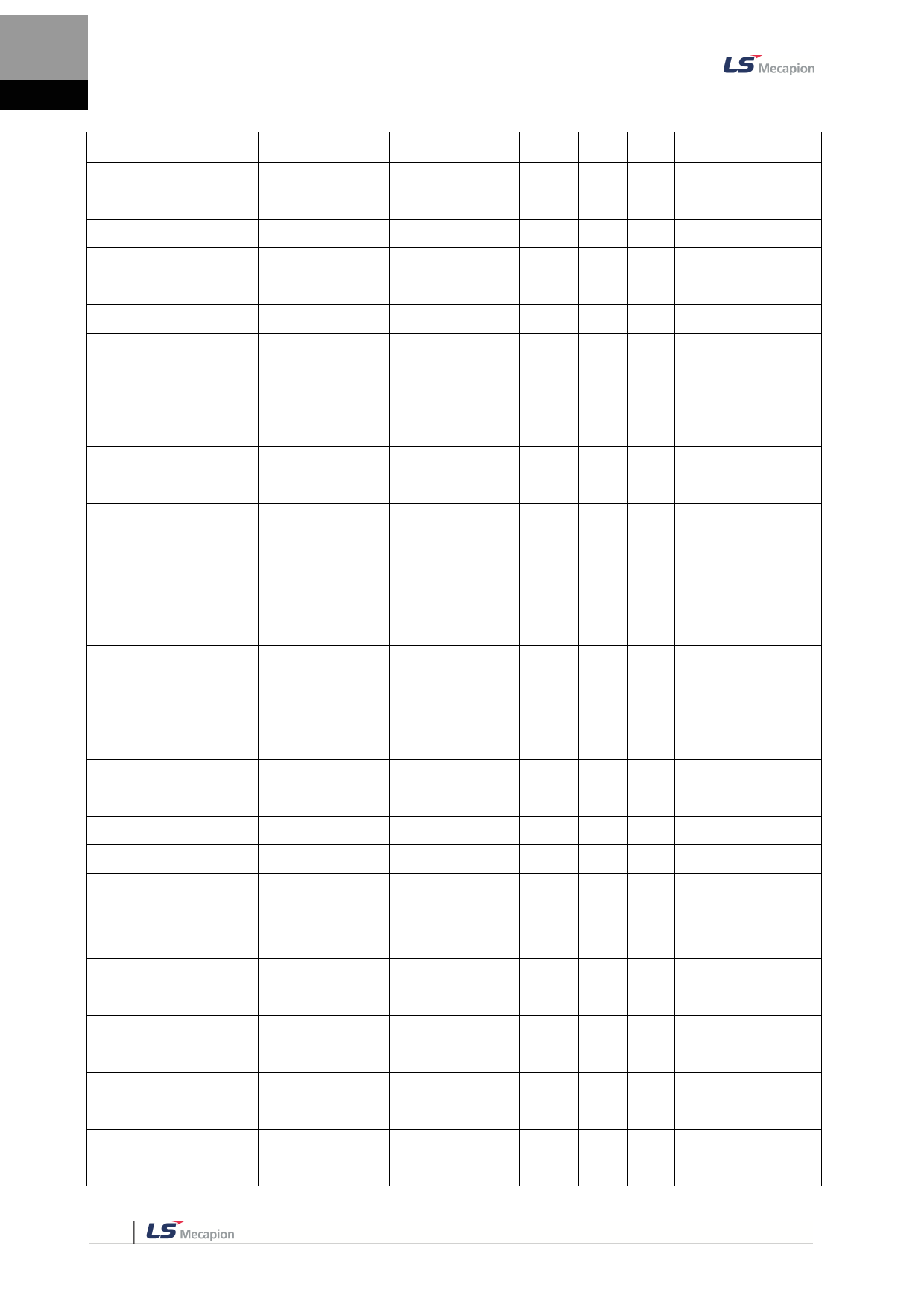
15-20
Filter Time Constant
Speed Feedback Filter
0x210B
0x210B
UINT
2
0
1000 0.1ms
RW
Time Constant
0x210C
Speed Feed-forward Gain
0x210C
UINT
0
0
100
%
RW
Speed Feed-forward Filter
0x210D
0x210D
UINT
10
0
1000 0.1ms
RW
Time Constant
0x210E
Torque Feed-forward Gain
0x210E
UINT
0
0
100
%
RW
Torque Feed-forward Filter
0x210F
0x210F
UINT
10
0
1000 0.1ms
RW
Time Constant
Torque Limit Function
0x2110
0x2110
UINT
2
0
4
-
RW
Select
External Positive Torque
0x2111
0x2111
UINT
3000
0
5000
0.1%
RW
Limit Value
External Negative Torque
0x2112
0x2112
UINT
3000
0
5000
0.1%
RW
Limit Value
0x2113
Emergency Stop Torque
0x2113
UINT
1000
0
5000
0.1%
RW
P/PI Control Conversion
0x2114
0x2114
UINT
0
0
4
-
RW
Mode
0x2115
P Control Switch Torque
0x2115
UINT
500
0
5000
0.1%
RW
0x2116
P Control Switch Speed
0x2116
UINT
100
0
6000
rpm
RW
0x2117
P Control Switch
0x2117
UINT
1000
0
60000 rpm/s
RW
Acceleration
P Control Switch Following
0x2118
0x2118
UINT
100
0
60000 pulse
RW
Error
0x2119
Gain Conversion Mode
0x2119
UINT
0
0
7
-
RW
0x211A
Gain Conversion Time 1
0x211A
UINT
2
0
1000
ms
RW
0x211B
Gain Conversion Time 2
0x211B
UINT
2
0
1000
ms
RW
Gain Conversion Waiting
0x211C
0x211C
UINT
0
0
1000
ms
RW
Time 1
Gain Conversion Waiting
0x211D
0x211D
UINT
0
0
1000
ms
RW
Time 2
Dead Band for Position
0x211E
0x211E
UINT
0
0
1000
UU
RW
Control
0xFFF
0x211F
Drive Control Input 1
0x211F
UINT
0
0
-
RW
F
0xFFF
0x2120
Drive Control Input 2
0x2120
UINT
0
0
-
RW
F
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")