
15. Communication Protocol
8215
8216
8217
8218
8219
8220
8221
0x2017
0x2018
0x2019
0x201A
0x201B
0x201C
0x201D
8222
0x201E
8223
8224
8225
0x201F
0x2020
0x2021
V Phase Current Offset
W Phase Current Offset
Magnetic Pole Pitch
Linear Scale Resolution
Commutation Method
Commutation Current
Commutation Time
Grating Period of Sinusoidal
Encoder
Homing Done Behaviour
Velocity Function Select
Motor Hall Phase Config
0x2016
INT
0
-1000
1000
0.10%
RW
0x2017
INT
0
-1000
1000
0.10%
RW
0x2018
UINT
2400
1
65535
0.01mm
RW
0x2019
UINT
1000
1
65535
nm
RW
0x201A
UINT
0
0
2
-
RW
0x201B
UINT
500
0
1000
0.10%
RW
0x201C
UINT
1000
500
5000
ms
RW
0x201D
UINT
40
1
65535
Um
RW
0x201E
UINT
0
0
0x201F
UINT
0
0
0x2020
UINT
0
0
1
-
RW
2
-
RW
1
-
RW
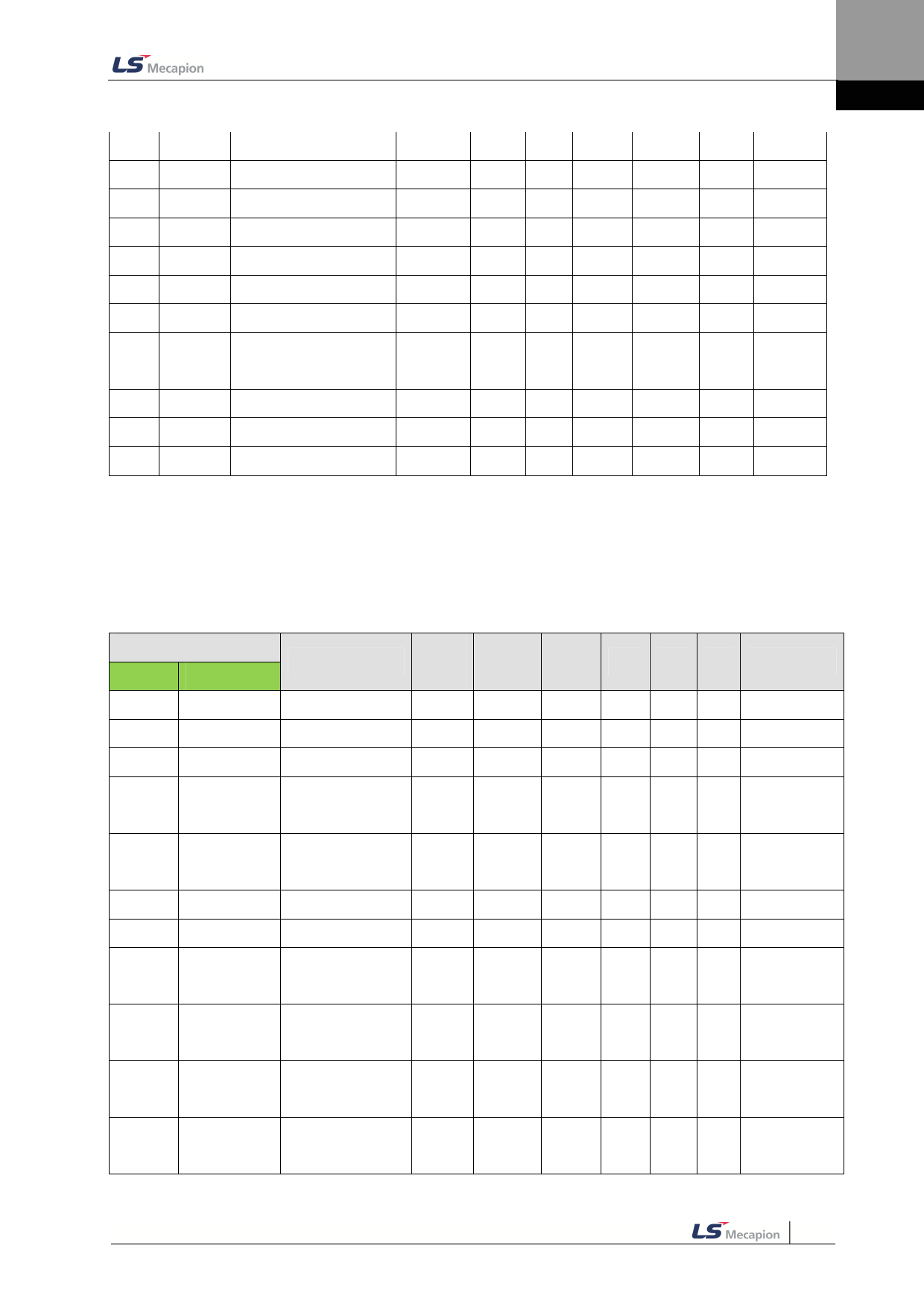
15.3.2 Control Parameters
communication address
decimal
hexadecimal
8448
0x2100
8449
0x2101
8450
0x2102
8451
0x2103
8452
8453
8454
8455
0x2104
0x2105
0x2106
0x2107
8456
0x2108
8457
0x2109
8458
0x210A
parameter name
parameter
Variable
Default
Min
Max
Unit
No.
Format
Value
Inertia Ratio
0x2100
UINT
100
0
3000
%
Position Loop Gain 1
0x2101
UINT
50
0
500
1/s
Speed Loop Gain 1
0x2102
UINT
75
0
2000
Hz
Speed Loop Integral Time
0x2103
UINT
50
1
1000
ms
Constant 1
Torque Command Filter
0x2104
UINT
0
0
1000 0.1ms
Time Constant 1
Position Loop Gain 2
0x2105
UINT
30
0
500
1/s
Speed Loop Gain 2
0x2106
UINT
50
0
2000
Hz
Speed Loop Integral Time
0x2107
UINT
50
1
1000
ms
Constant 2
Torque Command Filter
0x2108
UINT
0
0
1000 0.1ms
Time Constant 2
Position Command Filter
0x2109
UINT
0
0
1000 0.1ms
Time Constant
Position Command
0x210A
UINT
0
0
1000 0.1ms
Average
Accessibility
RW
RW
RW
RW
RW
RW
RW
RW
RW
RW
RW
15-19
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")