
12. Communication Protocol
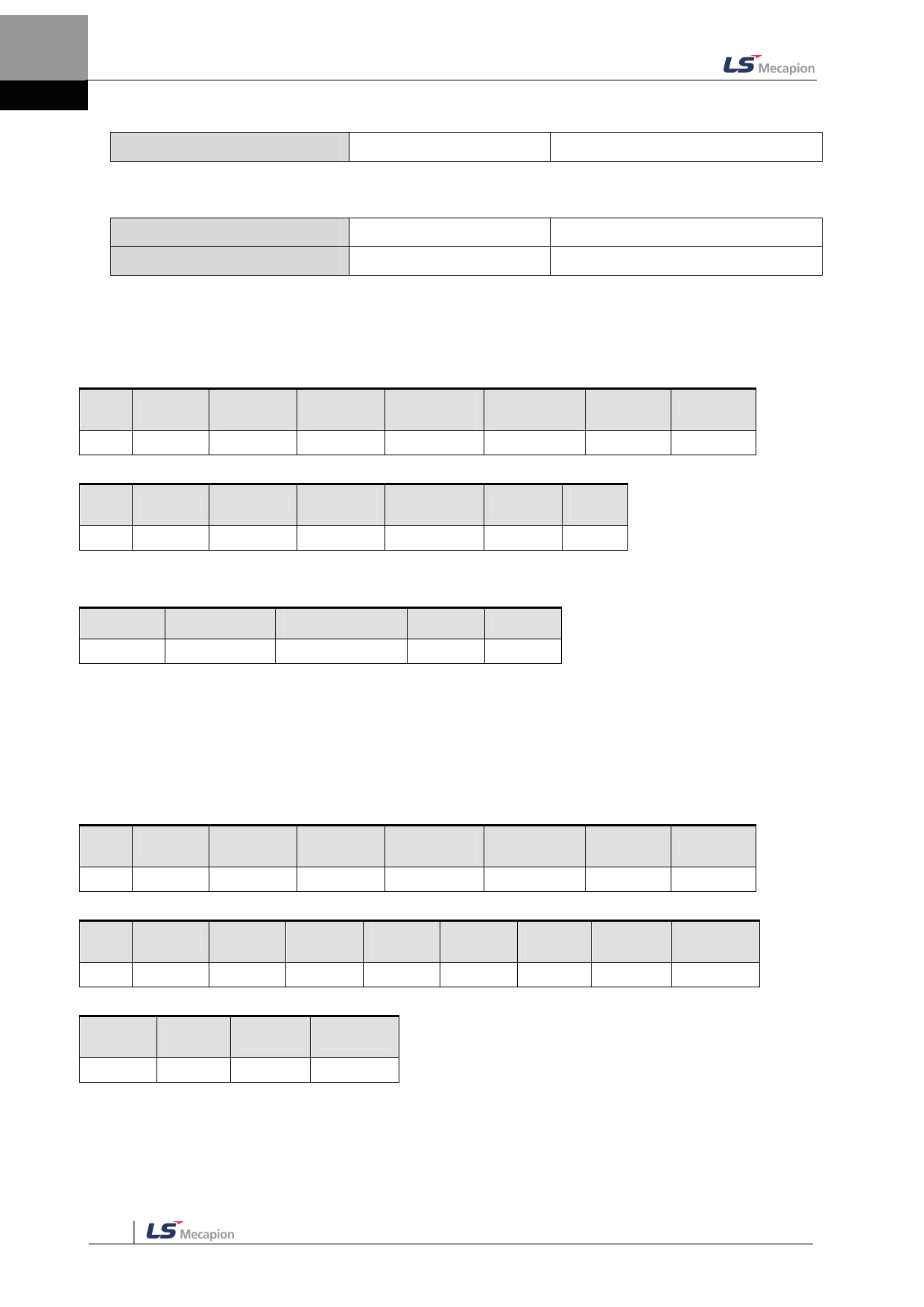
Quantity of Registers
Response not OK
Error code
Exception code
N* x 2 Bytes
1Byte
1Byte
*N = Quantity of Registers
0x83
0x01 ~ 0x06
Example1) reading a single parameter (current speed (Address: 0x2600))
Request
Node
ID
Function
Starting
Address Hi
0x01 0x03
0x26
Request OK
Starting
Address Lo
0x00
Quantity of
Register Hi.
0x00
Node
ID
0x01
Function
0x03
Byte Count
0x02
Register
Value Hi
0x00
Register
Value Lo
0x00
- The current speed value is 0(or 0x0000).
Response not OK
Node ID
Error Code
Exception Code CRC Hi
0x01
0x83
0x01 ~ 0x06
-
Quantity of
Register Lo
0x01
CRC Hi
0x8F
CRC Hi
0xB8
CRC
Lo
0x44
CRC Lo
-
CRC Lo
0x42
Example 2) Reading multiple parameters (motorID(Address: 0x2000),
EncoderType(Address: 0x2001), number of encoder pulses per rotation (Address:
0x2002~0x2003))
Request
Node
ID
Function
Starting
Starting
Address Hi Address Lo
Quantity of
Register Hi.
Quantity of
Register Lo
0x01 0x03
0x20
0x00
0x00
0x04
Request OK
Node
ID
Function
Byte
Count
Register Register Register Register
Value Hi Value Lo Value Hi Value Lo
0x01 0x03
0x08
0x00
0x0D
0x00
0x02
CRC Hi
0x4F
Register
Value Hi
0x00
CRC Lo
0XC9
Register
Value Lo
0x00
Register Register
Value Hi Value Lo
CRC Hi
CRC Lo
0x00
0x08
0x31
0X11
- motorID(Address: 0x2000) value reads 13(or 0x000D), and Encodertype (Address: 0x2001) value
reads 2(or 0x0002). Number of encoder pulses per rotation (Address: 0x2002~0x2003) is a 32bit data,
so the data must be swapped once read. Thus, the currently displayed balue 524288(or 0x00080000).
Response not OK
15-10
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")