
12. Communication Protocol
15-4
This indicates the Node ID of the servo driver to transmit.
The Node ID of servoDrive can be configured with the external switch at the loader window. The set
Node ID can be viewed at parameter [0x2003].
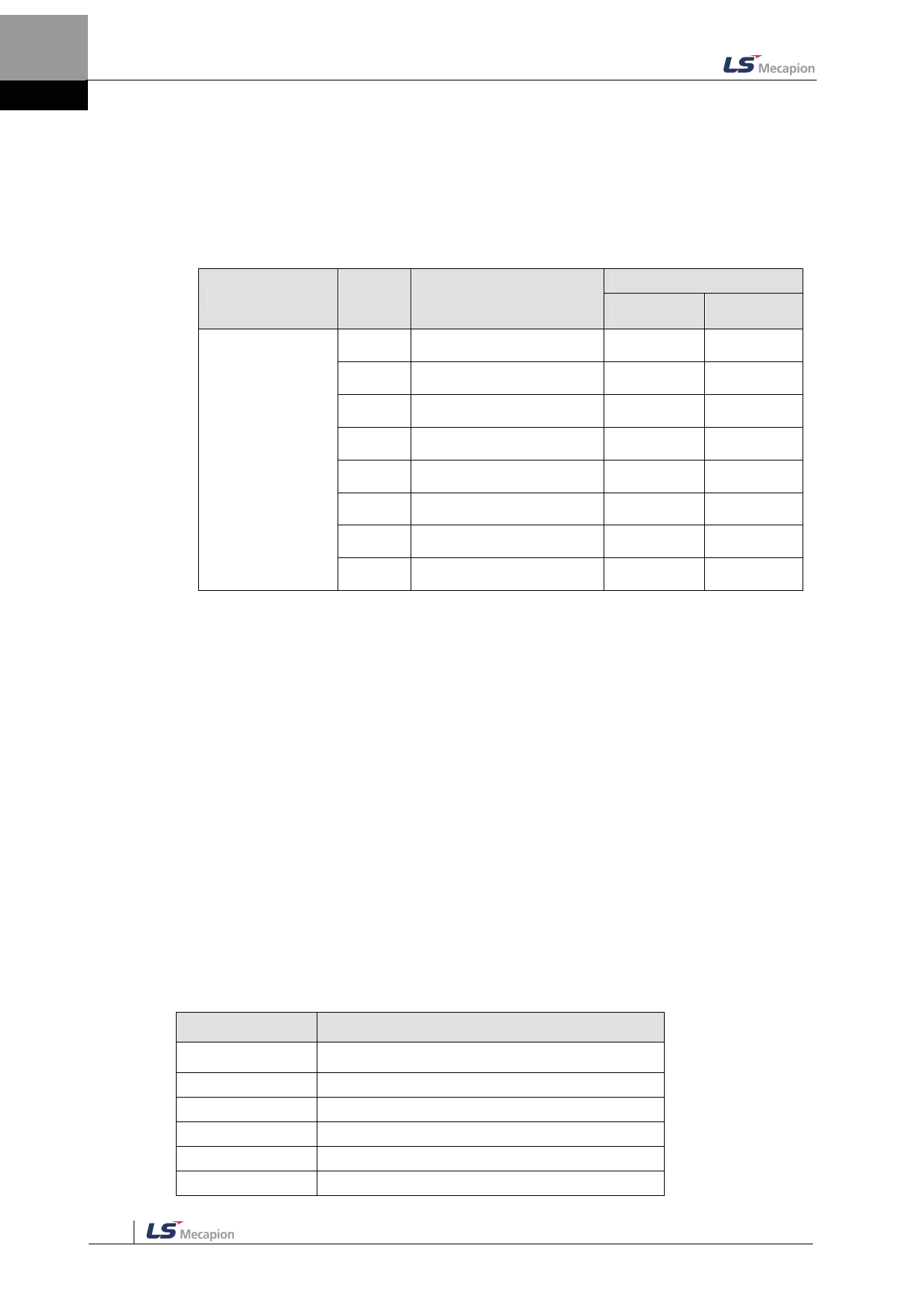
Function Code
Function Codes under Modbus-RTU Standardsupported by L7P Drive are as follows.
Category
Comm
and
Code
0x01
Descriptions
Read Coils
Usage
Read
Write
○
0x02
Read Discrete Inputs
○
0x03
Read Holding Registers
○
0x04
Read Input Register
○
PUBLIC Function
Code
0x05
Write Single Coil
○
0x06
Write Single Register
○
0x0F
Write Multiple Coils
○
0x10
Write Multi Register
○
Data
[Transmission] :In the case of Read Registercommand, Modbus address, number of registers,
and number of bytes, etc. are designated. In case of Write Register command, Modbus address,
number of bytes, and value to set, etc. are designated.
[Reception]: In the case of Read Register command, under normal response, Node ID and
Function Code are received as the same values as the transmitted values. The value of each
register is received in the order they were transmitted.
In the case of Write Single Register command, the same values as the transmitted values are
received. In the case of Write Multi Register, the starting address intended to write the data in with
the same values as the transmitted values and the number of registers are received.
Abnormal response consists of Node ID, Error Code and Exception Code. Packet structure of
abnormal response is the same regardless of the function code.
CRC
Inputs 16bitCRC value. The values are divided into MSB/LSB, and transmitted one byte at a time.
Exception Code
Exception codes for all function code abnormal responses supported by L7P Drive are defined as
follows.
Exception Code
Description
0x01
Function Code not supported
0x02
0x03
0x04
0x05
0x06
Wrong register address
Wrong data value
Device malfunction
Data not ready
parameterlocked
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")