
12. Communication Protocol
Note 2)The servo drive’s IN/OUT connectorpins are internally connected 1 to 1, allowing for convenient
multi-drop wiring.
15.1.2 Comunication Specifications and Connection
Diagram
Communication Specifications
Item
Specifications
Communication Standard ANSI/TIA/EIA-422 Standard
Communication Protocol MODBUS-RTU
Data
Type
Data bit
Stop bit
Parity
8bit
1bit
None
Syncrho
Asyncrhonous method
Transmission Speed
9600 /19200/38400/57600 [bps]
Speed can be selected at communication
spped setting [0x3002]
Transmission Distance Up to 200 [m]
Power Consumption
Under 100[㎃]
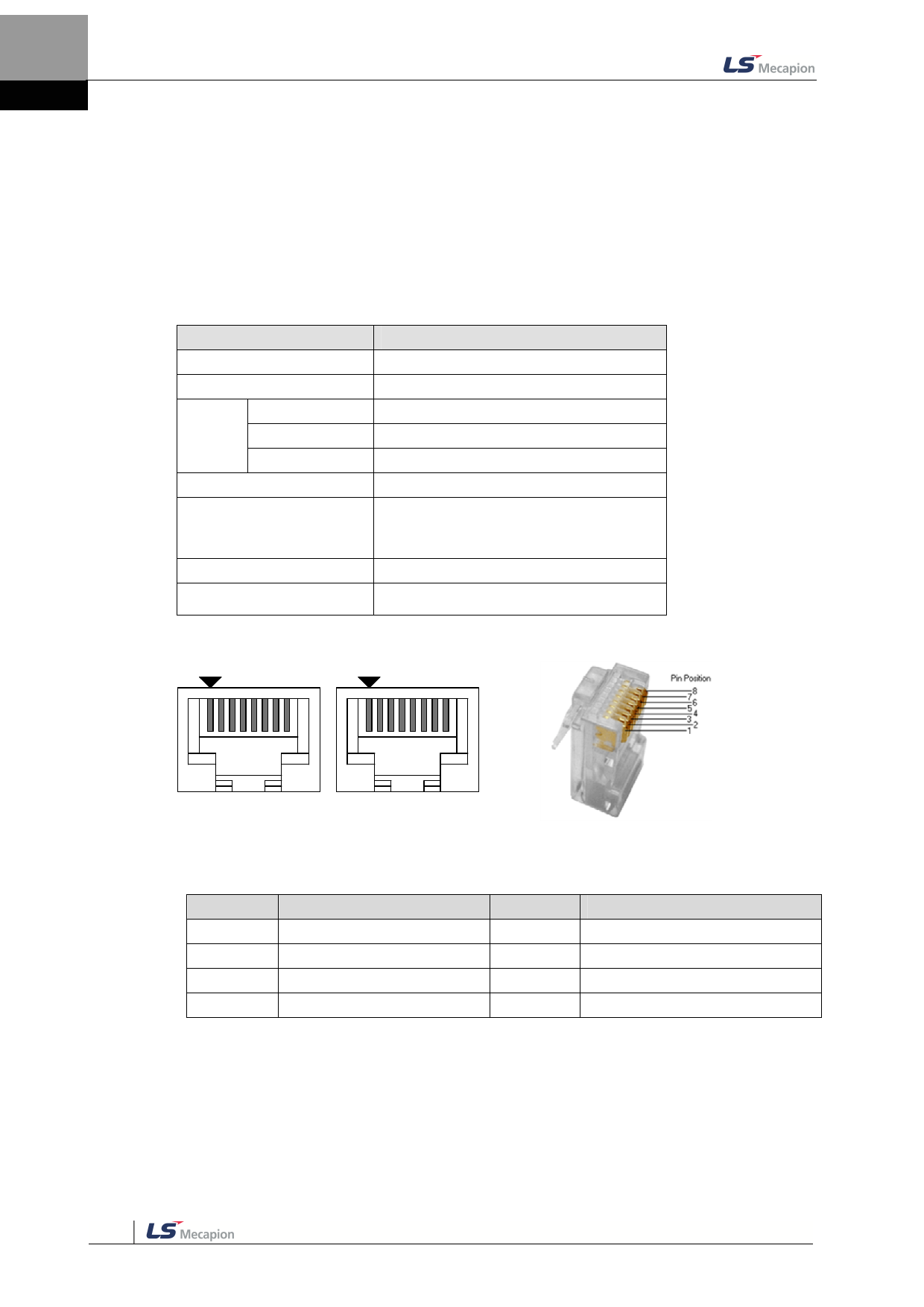
RS-422 communication connectorpin connection
1
8
1
8
OUT
IN
Pin arrangement viewed from the front
side of the drive
Pin arrangement viewed from the
connector
Pin No.
1
2
3
4
Pin Function
Not Used
Not Used
RXD+
TXD-
Pin No.
5
6
7
8
Pin Function
TXD+
RXD-
Not UsedNote 1)
Not UsedNote 1)
Note 3)As for INconnector, 5V voltage is output to Pin No. 7 and Pin No. 8, to supply power to the handy
loader. Use for any other purpose is not allowed, and do not connect Pin No. 7 and Pin No.
8 when wiring.
Note 4)Connect TXD+ and TXD-, RXD+ and RXD- using twisted pair
Note 5)TXD and RXD of the above table is defined based on the servo drive.
15-2
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")