
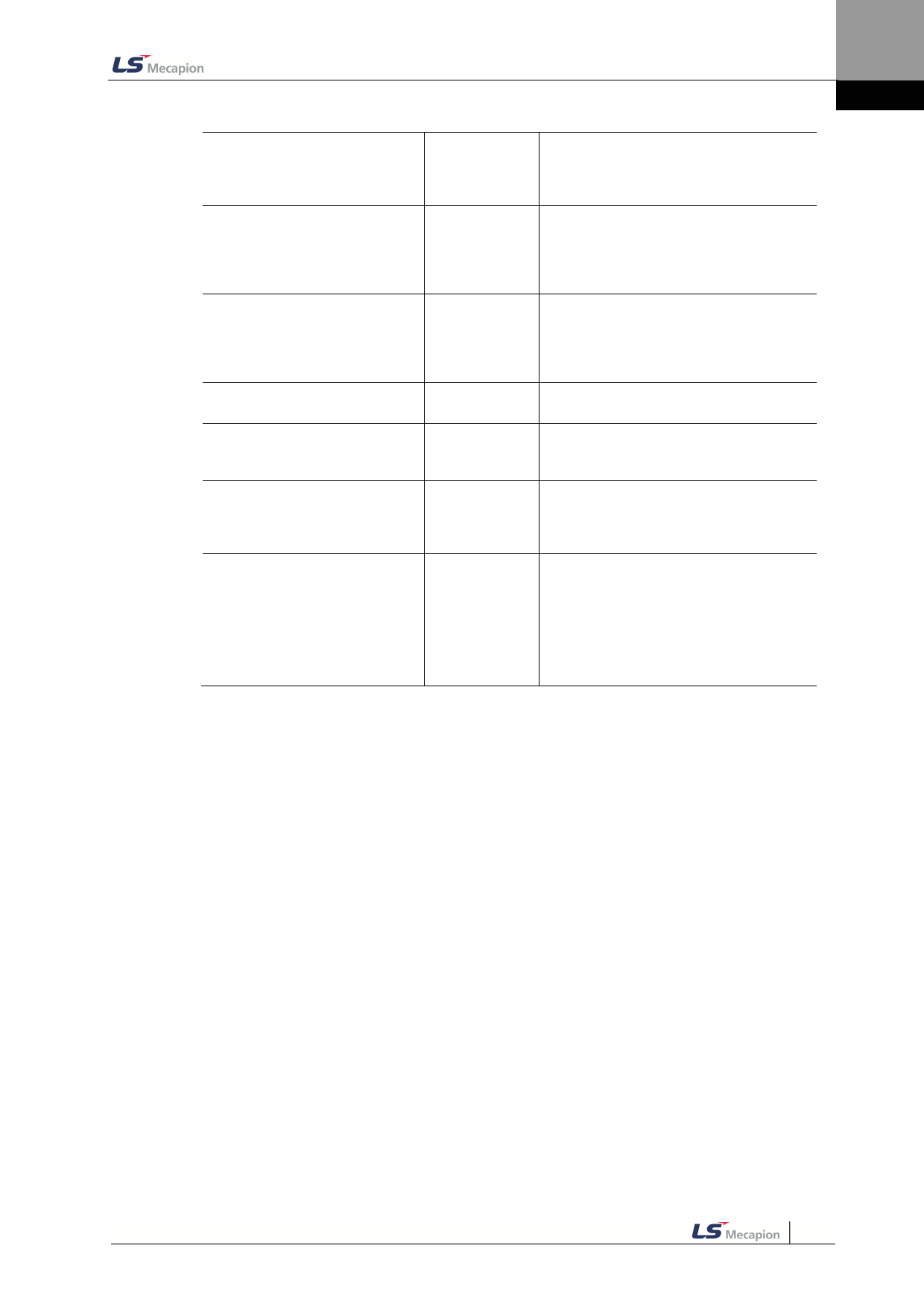
** NCL
** PAUSE
** ABSRQ
** JSTART
** JDIR
** PCLR
** AOVR
2. Wiring and Connection
Limit negative
torque
Pause
Absolute
positiondata
request
Jog operation
Select jog
rotation
direction
Clear input
pulse
Select speed
override
When the NCL signal is on, positive torque
is limited. [0x2110] You can preset the
action, and the torque limit is determined
by [0x2111].
Inputting the PAUSE signal during index
operation will slow down and stop the
motor. And when the PAUSE signal is re-
entered, the operation to the original index
resumes.
Upon request of the absolute data of the
absolute encoder, the data of the absolute
encoder is transmitted to a Host controller
in quadrature pulse format through AO, BO
output.
When the signali is ON,Jong operation
begins at a speed set by [0x2300].
Changes rotation direction for jog operation
When the signal is ON, the input pulse is
not received and the position error
becomes 0. Operation mode can be set at
[0x3005].
When the AOVR signal is ON, the index
operation speed is overridden in
accordance with the voltage input into the
A-OVR(AI2)
The override value is 0% under -10Vinput,
100% under 0V input, and 200% under
+10V input.
2-11
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")