
13. Object Dictionary
Variable
Format
UINT
Setting Range
0 to 6000
Default
Value
10
Accessi PDOAllo Change
Unit
Store
bility
cation
Property
rpm
RW
Yes
At all times Yes
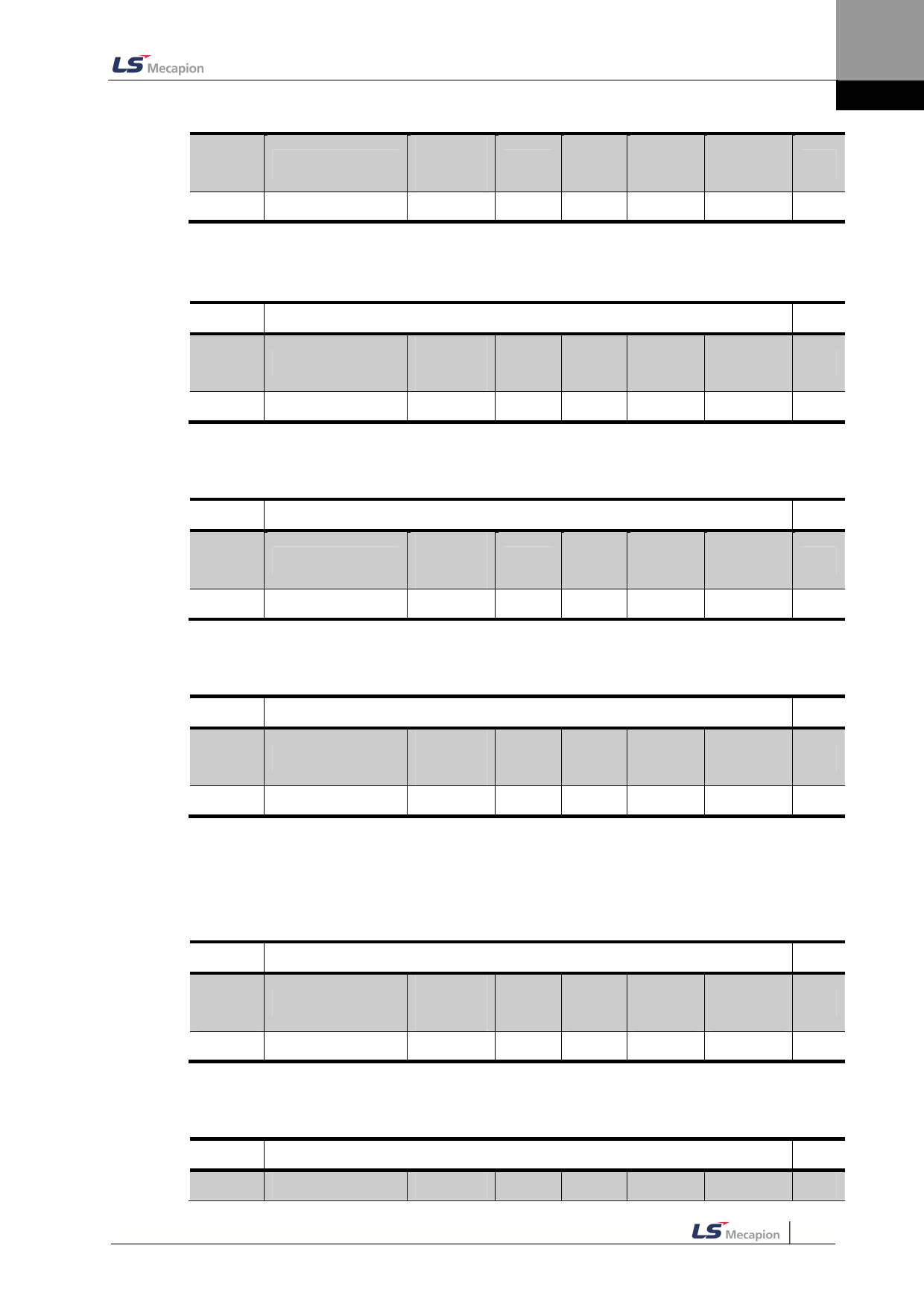
ZSPD signal is output when the currentspeed is smaller than the set value.
0x2405
Variable
Format
UINT
Setting Range
0 to 6000
TGON Output Range
P
Default
Value
100
Accessi PDOAllo Change
Unit
Store
bility
cation
Property
rpm
RW
Yes
At all times Yes
TGON signal is output when the currentspeed is smaller than the set value.
0x2406
Variable
Format
UINT
Setting Range
0 to 6000
INSPD Output Range
P
Default
Value
100
Accessi PDOAllo Change
Unit
Store
bility
cation
Property
rpm
RW
Yes
At all times Yes
INSPD signal is output when the currentspeed is smaller than the set value.
0x2407
Variable
Format
UINT
Setting Range
0 to 6000
BRAKE Output Speed
Default
Value
100
Accessi PDOAllo
Unit
bility
cation
rpm
RW
No
Change
Property
Servo Off
P
Store
Yes
When the motor stops due to servo-off or servo alarm, you can set the output timing by setting the
brake signal output speed(0x2407) and delay time(0x2408). When the motor’s rotational speed is
under the set speed(0x2407), or the output delay time (0x2408) lapses after servo off command,
the brake signal is output.
0x2408
Variable
Format
UINT
Setting Range
0 to 1000
See descriptions on 0x2407
BRAKE Output Delay Time
Default
Value
100
Accessi PDOAllo
Unit
bility
cation
ms
RW
No
Change
Property
Servo Off
P
Store
Yes
0x2409
Variable
Setting Range
Torque Limit at Homing Using Stopper
Default
Unit Accessi PDOAllo
Change
ALL
Store
13-57
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")