
13. Object Dictionary
11
Tamagawa Serial(single turn only)
12
Tamagawa Serial Absolute(multi-turn 16 bit)
13
EnDat 2.2
0x2002
Variable
Format
Setting Range
UDINT 0 to 1073741824
Encoder Pulse per Revolution
Default
Value
Accessi PDOAllo
Unit
bility
cation
4096
pulse
RW
No
Change
Property
Power
Resupply
ALL
Store
Yes
Sets encoder resolution by pulse (count).Encoder resolution can generally be confirmed from the
name plate (See explanation on 0x2000). However, serial encoders supplied by us are
automatically recognized regardless of the set value. In such cases, you can check the resolution of
the automatically recognized encoder.
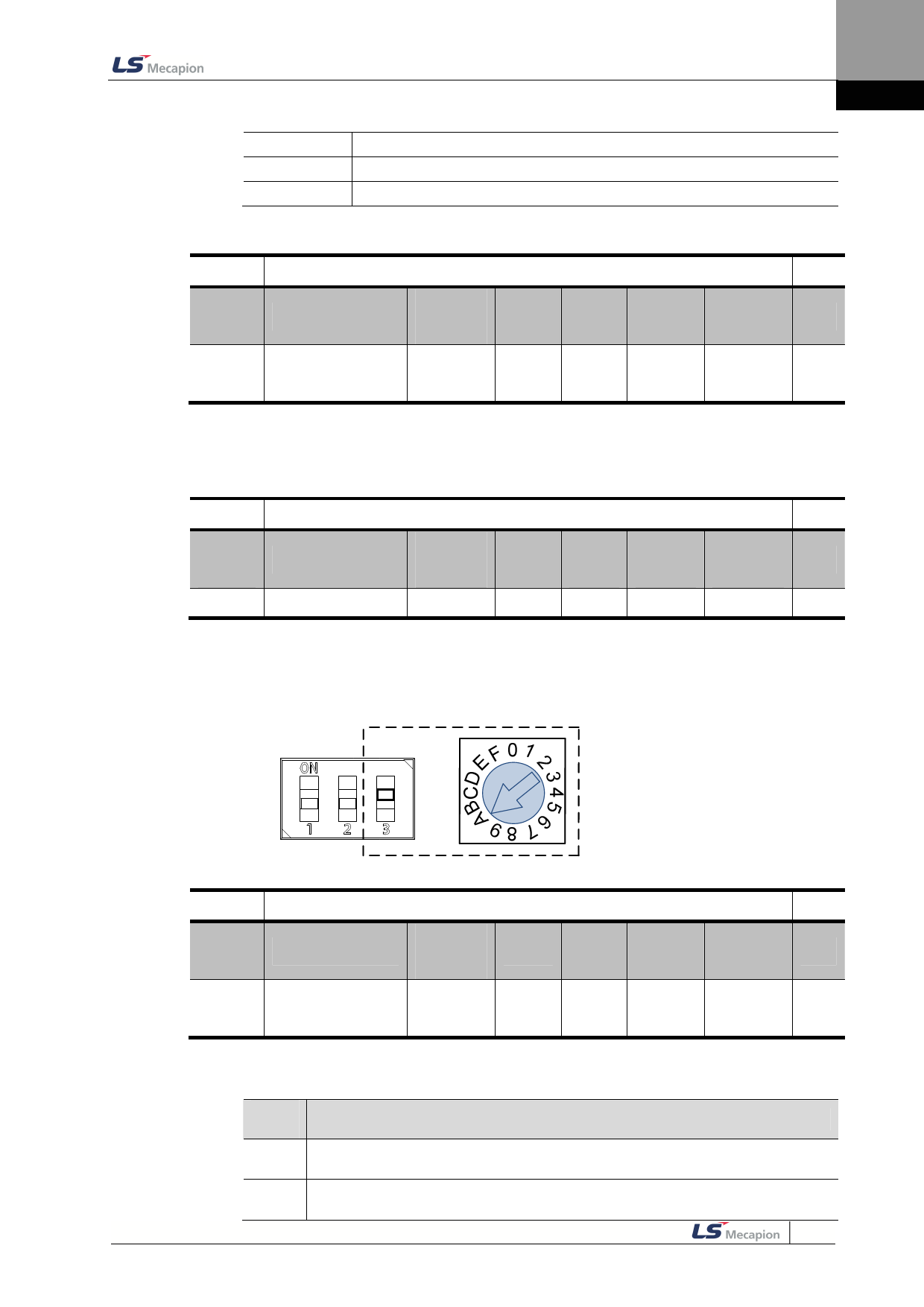
0x2003
Variable
Format
UINT
Setting Range
0 to 65535
Default
Value
-
Node ID
Accessi PDOAllo
Unit
bility
cation
-
RO
No
Change
Property
-
ALL
Store
No
Shows the node ID set by the node switch of the drive. The node switch value is read only once
when the power comes on. Subsequent changes apply when the power is supplied once again.
Example) Noide ID setting to 26(0x1A)
0x2004
Variable
Format
UINT
Setting Range
0 to 1
Rotation Direction Select
Default
Value
Accessi PDOAllo
Unit
bility
cation
0
-
RW
No
Change
Property
Power
Resupply
ALL
Store
Yes
Sets the motor’s rotation direction. If the direction is changed from the user’s standpoint at the final
mechanical unit, the direction can be changed through this setting.
Set
Value
0
1
Descriptions
Positive command turns the motor counter clockwise. In this case, the position
feedback value increases
Positive command turns the motor clockwise. In this case, the position feedback
value decreases.
13-15
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")