
12. Procedure Functions
12.6 Absolute Encder Setting
Resets absolute encoder. Absolute encoder reset is needed in the following cases.
Setting up the mechanical unit for the first time
Encoder low voltage occurs
The multi-turn data of absolute encoder needs to be 0
Resetting the absolute encoder resets multi-turn data(0x260A) and single-turn data(0x2607)
back to 0. Re supplying power after reset changes the position actual value (0x6064) to the
reset position value.
After power resupply, the position actual value (0x6064) of the absolute encoder is read and
displayed by applying Home offset(0x607C).
Changing the home offset (0x607C) during operation will not change the position actual
value (0x6064).
Related Objects
Index
0x2005
Sub
Index
Name
- Absolute Encoder Configuration
0x2607
SingleTurn Data
0x260A
MultiTurn Data
Variable
Format
Accessibility
PDO
Allocation
Unit
UINT
RW
No
-
UDINT
RO
Yes
pulse
DINT
RO
Yes
rev
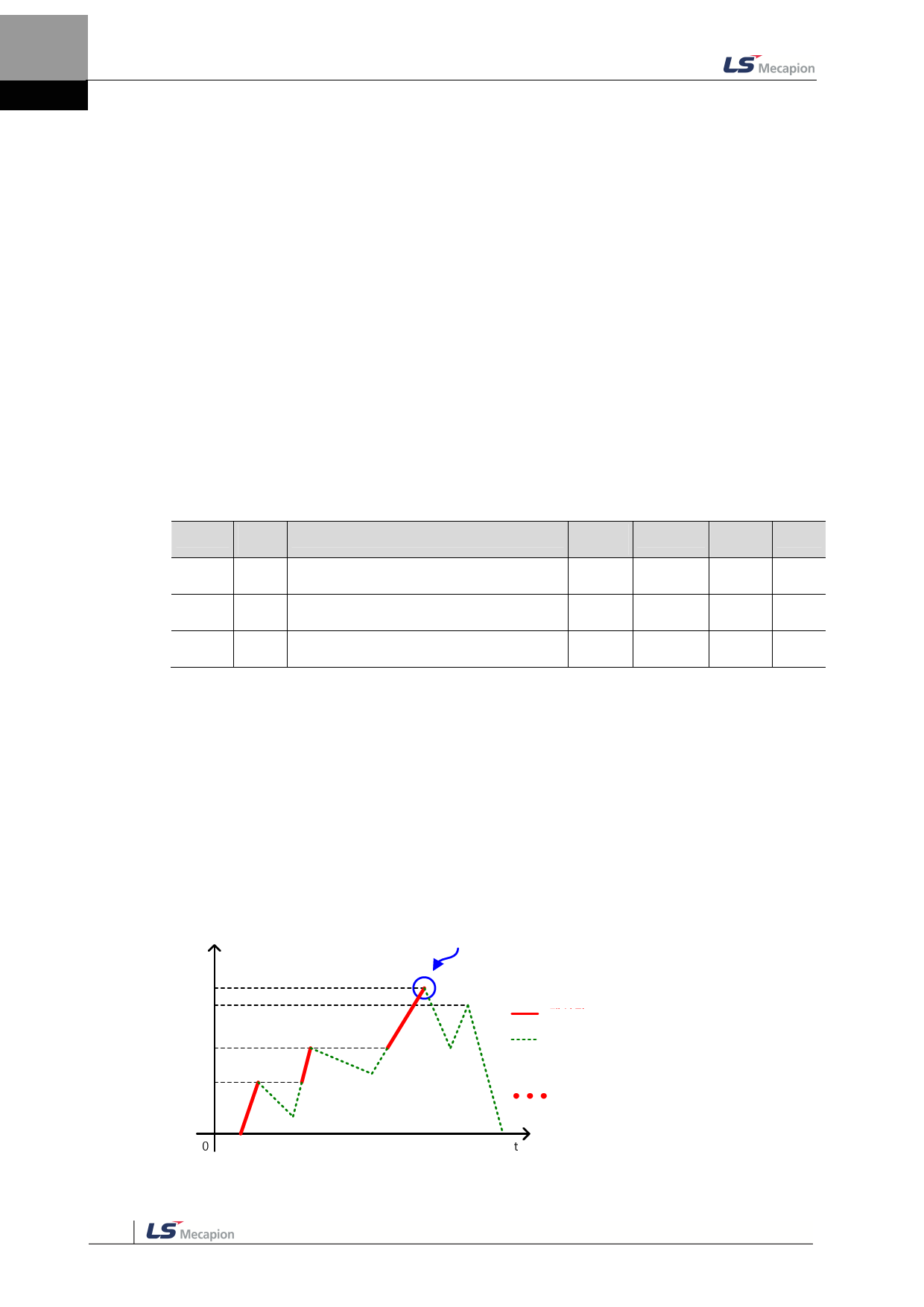
12.7 Instantaneous Maximum Torque Reset
Resets the instantaneous maximum overload rate (0x2604) into 0. The instantaneous
maximum overload rate represents the maximum operation overload rate output by the drive
instantaneously.
The peak load from the momen the servo is powered on to the present is displayed in
percentage to the rated output. The unit is [0.1%]. Resupplying power resets the value to 0.
Torque
Instantaneous peak
overload
Update occurs when the current operation load ratio exceeds
the maximum instantaneous peak overload stored, which is
displayed at 0x2604
Updated
Not updated
12-6
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")