
11. Tuning
11. Tuning
Cu전rre류nt 피fe드ed백back
Positi위on치
comma명n령d
속S도peed
Position control c명om령mand
operation
토T크 orque
Speed control c지om령mand
operation
Torque
control
ope ration
전Volt압age
c지omm령and Po파w워er
ci회rcu로it
Mo모to터r E엔nco코d더er
Posit위ion치fe피ed드b백ack
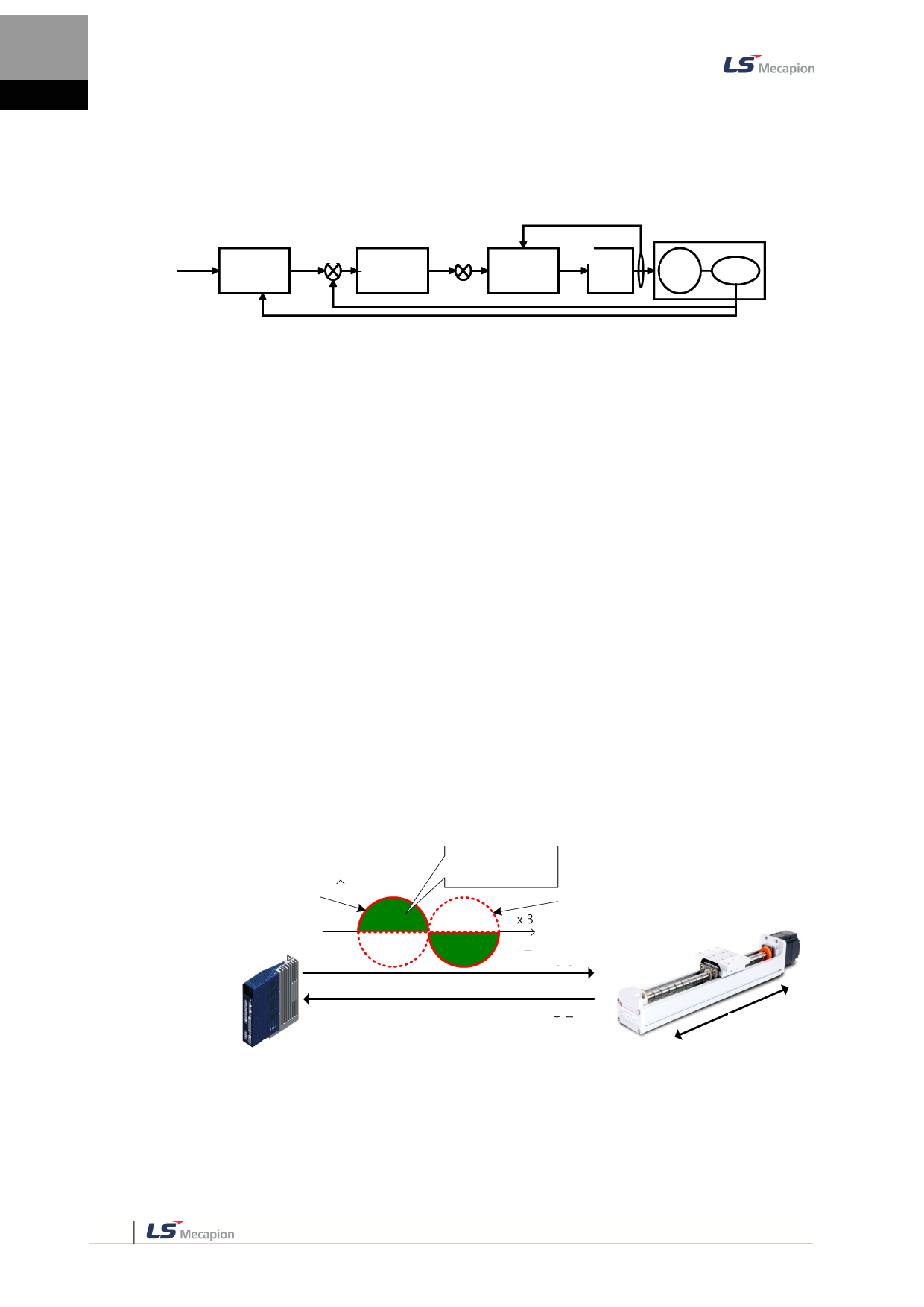
You can use the drive at the torque control mode, speed control mode or position control
mode, depending on the connection method with the host device. The drive’s control
structure takes the cascade form, where the position control is positioned at the outermost
and the current control is positioned at the innermost. Depending on the drive’s operation
mode, you can tune the gain-related paramters of the torque controller, speed controller or
position controller to suit your purposes.
11.1 Automatic Gain Tuning
You can automatically set gains corresponding to the load conditions, using commands
generated by the drive itself. The gain-related parameters subject to change are as follows.
Inertia, intertia ratio, positionloopgain, speedloopgain, speedintegraltime constant,
torquecommandfiltertime constant, notchfilter3frequency, notchfilter4frequency
The overall gain is set to either high or low, depending on the set value of the system rigidity
for gaintuning. Please set the appropriate value depending on the rigidity of the load being
operated.
As shown in the figure below, commands in the sinusoidal form are generated either in the
forward or reverse direction depending on the set value of the offline gain tuning direction.
You can set the distance covered during tuning with the offline gain tuning distance (0x2511).
The distance increases along with the set value: please set the appropriate distance
depending on the situation. Please secure a sufficient distance before gain tuning (1 rotation
or above).
Tuning direction=0 (forward)
Offline gain tuning
distance (0X2511)
Tuning direction=1 (reverse)
Time
Command
Response
moving
distance
11-46
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")