
Related Objects
Index
0x2114
Sub
Index
Name
- P/PI Control Conversion Mode
0x2115
- P Control Switch Torque
0x2116
0x2117
0x2118
- P Control Switch Speed
- P Control Switch Acceleration
- P Control Switch Following Error
10. Application Functions
Variable
Format
Accessibility
PDO
Allocation
Unit
UINT
RW
Yes
-
UINT
RW
Yes
0.1%
UINT
RW
Yes
rpm
UINT
RW
Yes
rpm/s
UINT
RW
Yes
pulse
Spe속ed도
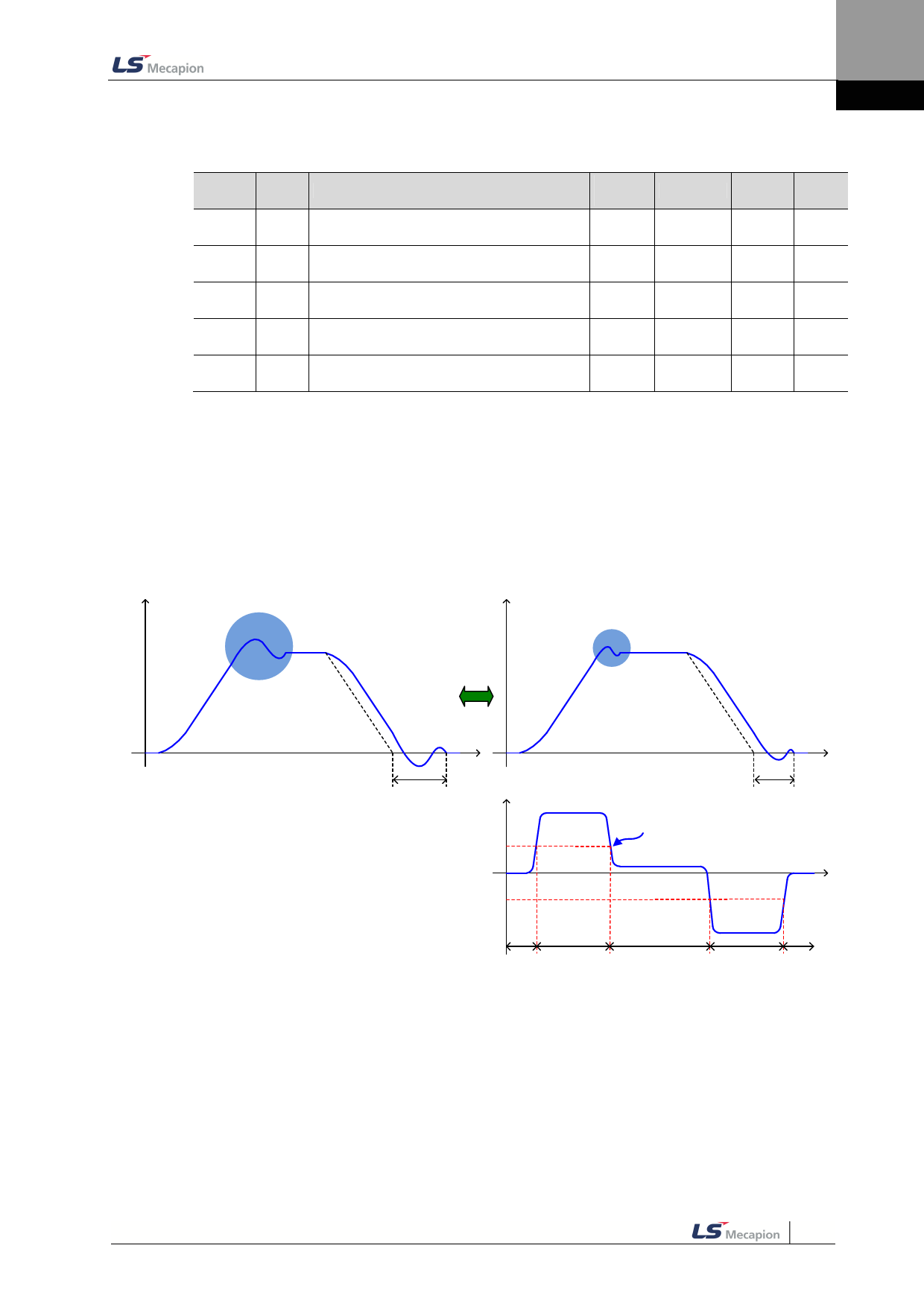
Example of P/PI conversion by torquecommand
Using PI control at all times without using P/PI conversion during speed control results in
accumulation of the integral term during acceleration/deceleration, which in turn results in
overshoot and longer position determination time. By using appropriate P/PI conversion
mode, you can reduce the determination time. The figure below shows an example of
conversion mode by torque command.
오O버ve슈rs트hoot
Spe속e도d
오O버v슈er트shoot
PPI제I c어on사tro용l시
시Tim간e
Position d위et치er결m정in시at간ion time
Tim속e도
+0x2115
-0x2115
When using PI/P
control conversion
시T간ime
Position det위er치m결ina정ti시on간time
T토or크qu명e령command
시tim간e
PIPcIo제n어trol PPI제co어ntrol
PIPcIo제n어trol
PIPc제on어trol PPIIc제on어trol
10-35
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")