
10. Application Functions
10.9.2 P/PI Control Conversion
PI control uses both proportion (P) gain and interal (I) gain of the speed controller. P control
refers to control using only proportion gain.
Proportion gain determines the responsivity of the overall controller, and the integral gain is
used to remove the error of the steady state. Excessive integral gain leads to overshoot
during acceleration/deceleration.
PI/P control conversion function involves coverting between PI control and P control, based
on the parameter conditions inside the servo (torque,speed,acceleration,position difference).
Speedcontrol: to inhibit overshoot / undershoot during acceleration/deceleration
Positioncontrol: to reduce position determination time by inhibiting undershoot during
determination action.
Similar effect can be achieved by acceleration/decelerationsetting at the host device, soft
start setting of the servo drive, andpositioncommandfilter, etc.
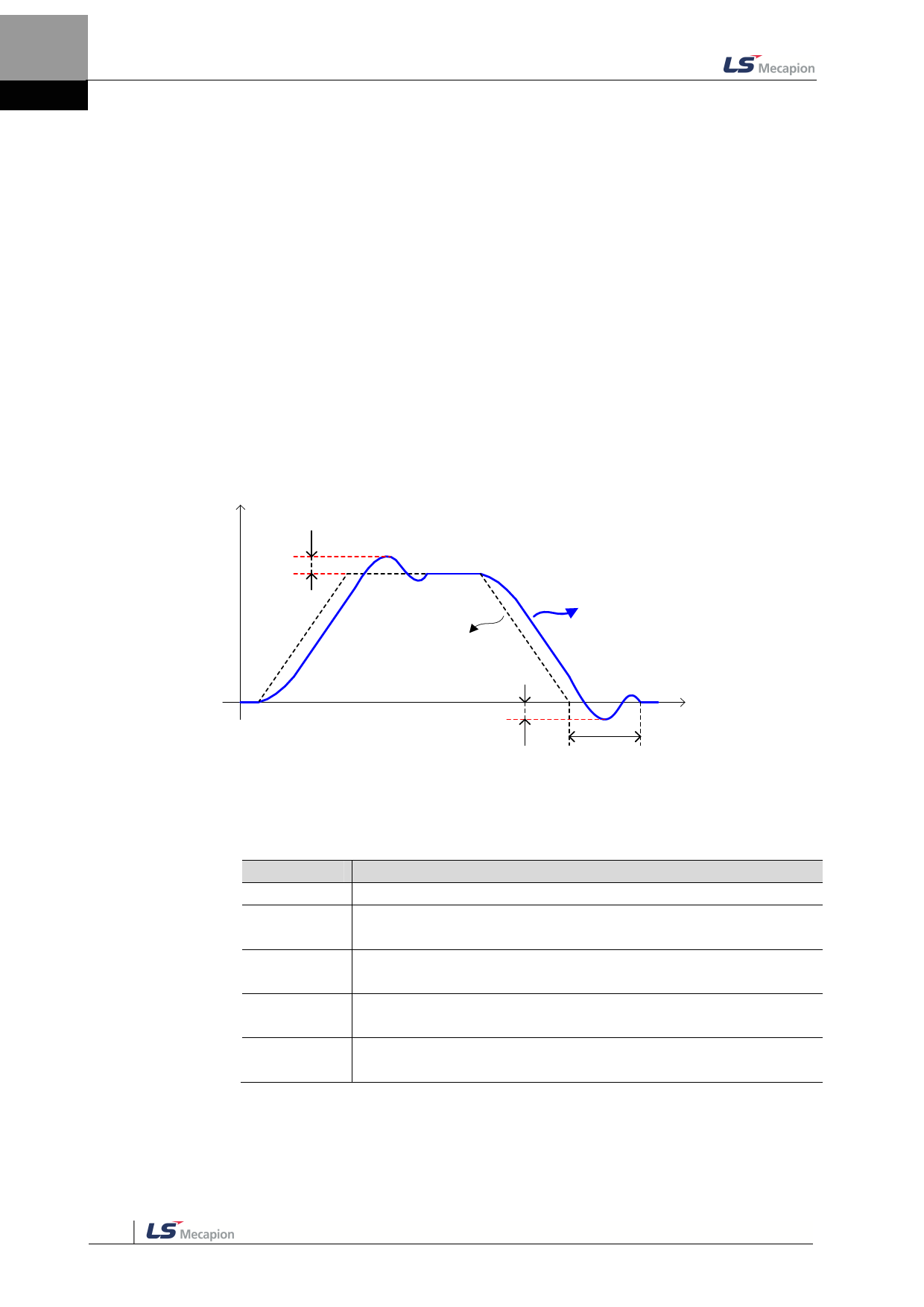
Speed
Overshoot
Speed command
Motor speed
Time
Undershoot
Position
determination time
You can set this function by P/PI control conversion mode (0x2114). Please see the
explanation below. Conversion to P control by PCON input is given priority over the set value
herein.
Set Value
0
1
2
3
4
Details
PI control at all times
Convert to P control when the commandtorque is over the P control
switch torque(0x2115)
Convert to P control when the commandspeed is over the P control
switch speed(0x2116)
Convert to P control when the acceperation command is over the P
control switch speed(0x2117)
Convert to P control when the following error is over the P control switch
following error(0x2117)
10-34
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")