
10. Application Functions
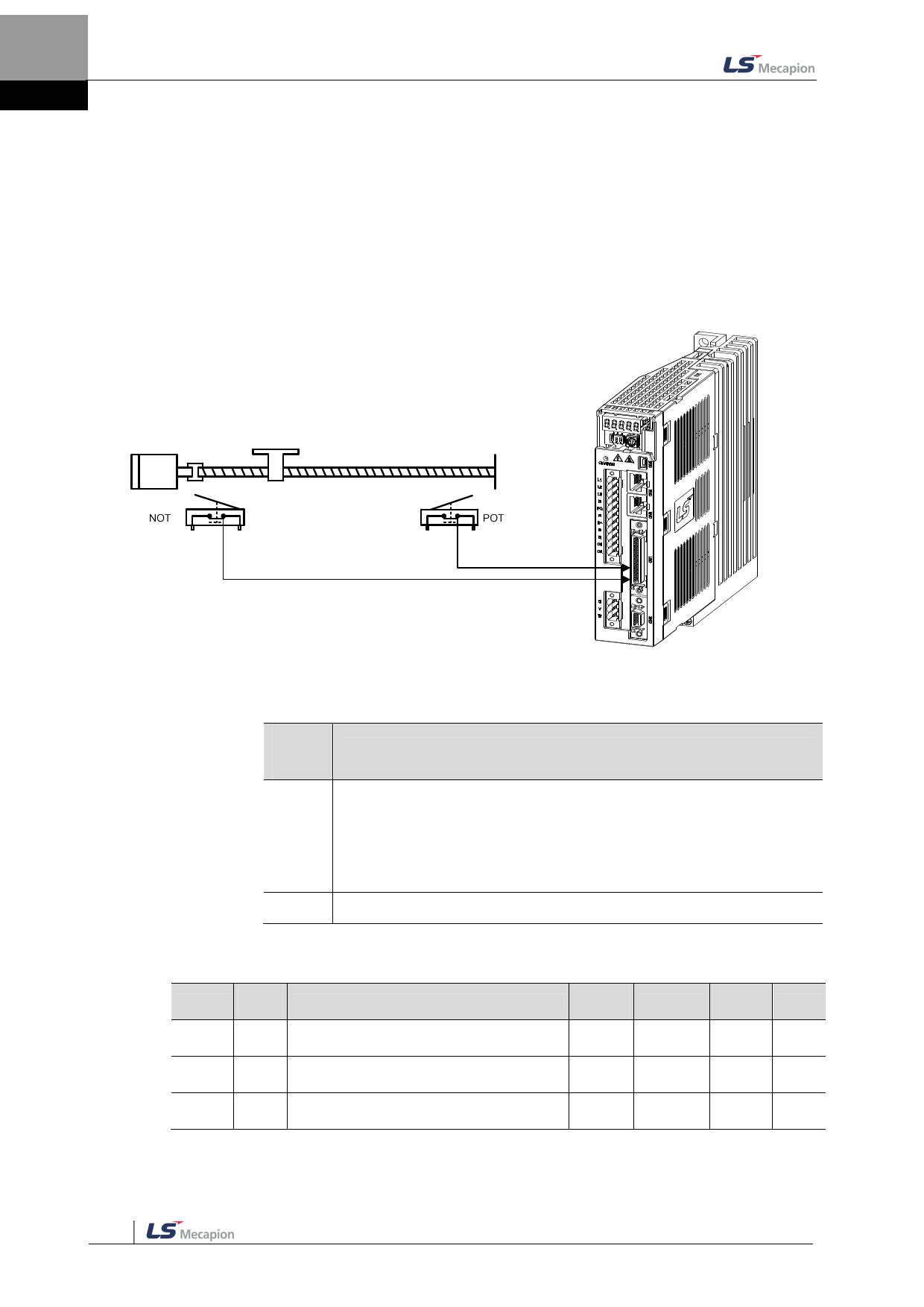
10.6 Forward/Reverse Limit Setting
This function allows you to safely operate the motor within the movement range of the unit,
using the drive’s forward and reverse limit signals. Please make sure to connect and set the
limit switch for safer operation. Please see 『5.2.1 Allocating Digital Input Signal』for setting
instructions.
I/O Pin 13
(Default allocated value)
I/O Pin 14
(Default allocated value)
When forward/reverselimit signal is input, you can stop the motor using the emergency stop
settng (0x2013).
Set
Value
0
1
Decriptions
Stop the motor following the method selected at the dynamic brake control
mode (0x2012)
Stop the motor using the dynamic brake, and maintain the torque command
at 0
Decelerate and stop using the emergency stop torque (0x2113)
Related Objects
Index
0x2012
Sub
Index
Name
- Dynamic Brake Control Mode
0x2013
- Emergency Stop Configuration
0x2113
- (Emergency Stop Torque
Variable
Format
Accessibility
PDO
Allocation
Unit
UINT
RW
No
-
UINT
RW
No
-
UINT
RW
Yes
-
10-26
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")