
10. Application Functions
Electronic gears are generally used for the following purposes.
(1) When driving loads based on the user unit.
- You can give command based on the user unit, regardless of the encoder (motor) type.
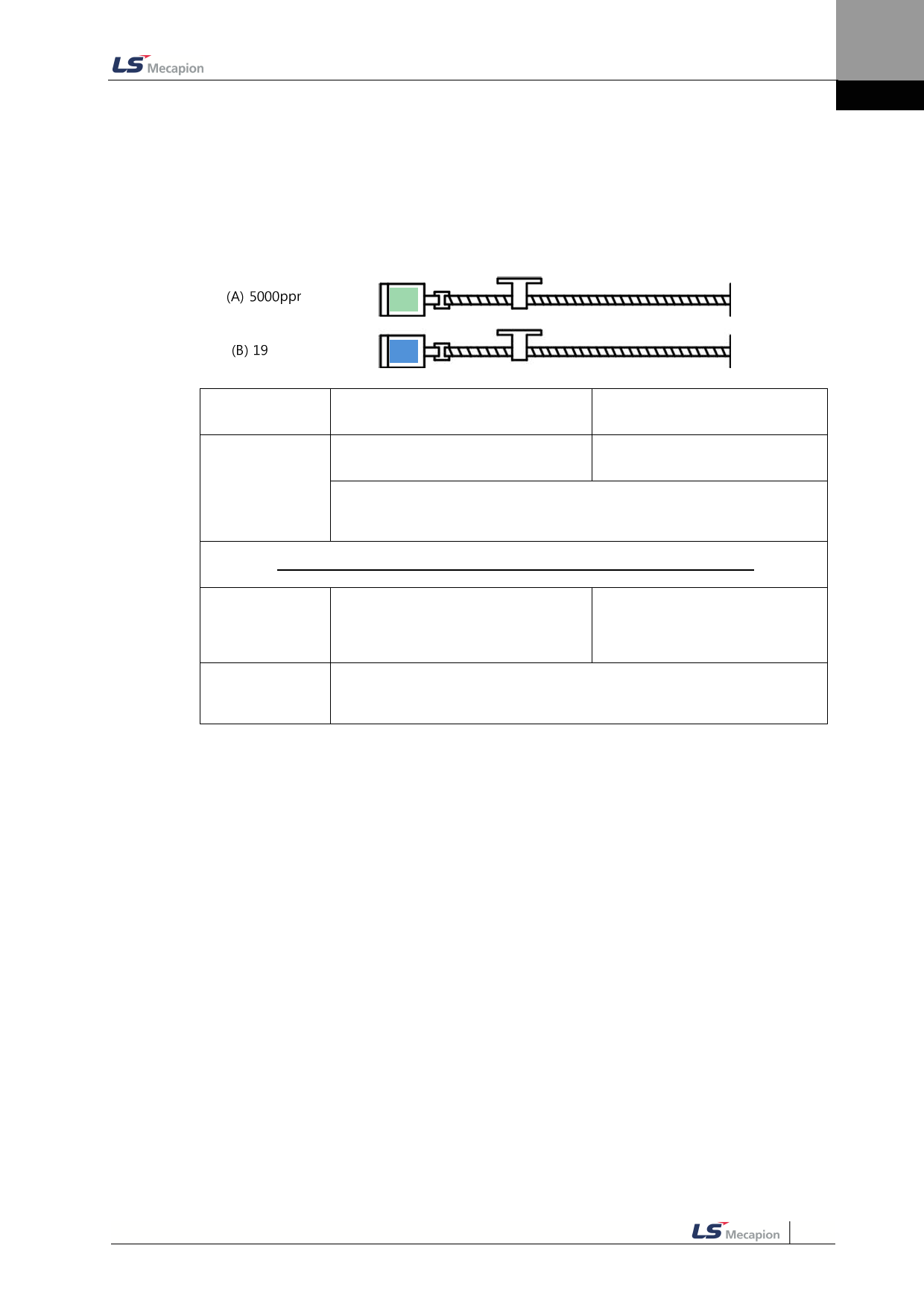
The table below shows comparison between 5000ppr encoder and 19bit encoder, when
moving 12mm using the same 10mm-pitch ball screw.
encorder
bit encorder
(A) 5000ppr Encoder
(B) 19bit (524288 ppr) Encoder
Without electronic
gear
5000*12/10 = 6000
524288*12/10=629145.6
Different commands should be given to each encoder (motor) when moving the same
distance
When giving command based on the minimum unit (user unit) of 1um(0.001mm)
Electronic gear
setting
Motor Revolutions =5000
Shaft Revolutions = 10000
Motor Revolutions =524288
Shaft Revolutions = 10000
With electronic
gear
You can give the same command to move 12000(12mm= 12000*1um) regardless of
the encoder (motor) type.
(2) When the output frequency of the host device and the drive’s input frequency are
restricted when driving a high-resolution encoder at a high speed
- A regular high-speed line drive pulse output unit has output frequency of around
500Kpps. The drive’s input frequency is around 1~4Mpps. For this reason, driving a
high-resolution encoder at a high speed restricts the output frequency of the host device
and the drive’s input frequenc. Electronic gears must be used to achieve normal driving.
10-19
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")