
9. Homing
9.1 Homing Methods
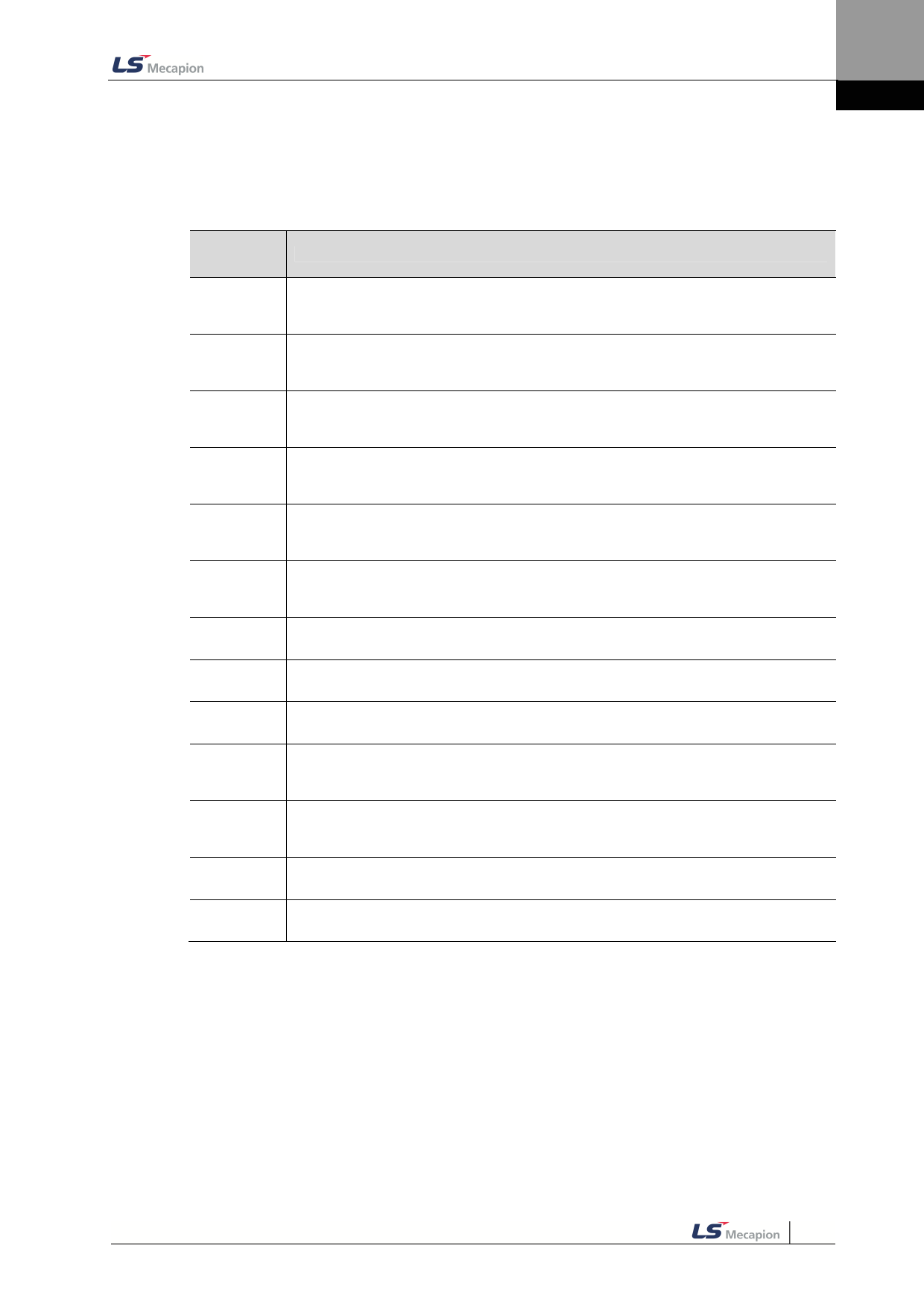
This drive supports the following homing methods (0x6098).
Homing
Methods
(0x6098)
1
2
7,8,9,10
11,12,13,14
24
28
Description
Duringreverse operation, the motor is returned to origin by negative limit switch (NOT) and index
(Z) pulse.
Duringforward operation, the motor is returned to origin by positive limit switch (POT) and index
(Z) pulse.
Duringforward operation, the motor is returned to origin by homing switch (POT) and index (Z)
pulse. While returning to origin, when positive limit switch (POT) is input, the direction changes.
Duringreverseoperation, the motor is returned to origin by homing switch (POT) and index (Z)
pulse. While returning to origin, when negative limit switch (NOT) is input, the direction changes.
Duringforward operation, the motor is returned to origin by homing switch (POT). While returning
to origin, when positive limit switch (POT) is input, the direction changes.
During reverse operation, the motor is returned to origin by homing switch (POT). While returning
to origin, when negative limit switch (NOT) is input, the direction changes.
33
Duringreverseoperation, the motor is returned to origin by index (Z) pulse.
34
Duringforward operation, the motor is returned to origin by index (Z) pulse.
35
The current position is set as origin.
During reverse operation, the motor is returned to the orign by reverse stopper and index (Z)
-1
pulse.
During forward operation, the motor is returned to the orign by forward stopper and index (Z)
-2
pulse.
-3
During reverse operation, the motor is returned to the orign by reverse stopper
-4
During forward operation, the motor is returned to origin by forward stopper
9-9
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")
 L7P INDEXER Series AC Servo User Manual")