
5/14/2018
O u tp u t F r e q u e n c y f
O u tp u t
V o lta g e
T im e t
0: Terminal command invalid when power on. Inverter will not run if it detect operating command termi nal
Fuling Inve r te r Use r Ma nua l - slide pdf.c om
is valid. When the operating command terminal is inv alid and enable this terminal again, invert er will run.
1: Terminal command valid when power on. Inverter will startup automatically after initiali zation is
finished if it detect operation command terminal is valid.
Note: Customer should be careful when you select this function, it may cause severe consequence.
F1 Motor Parameters
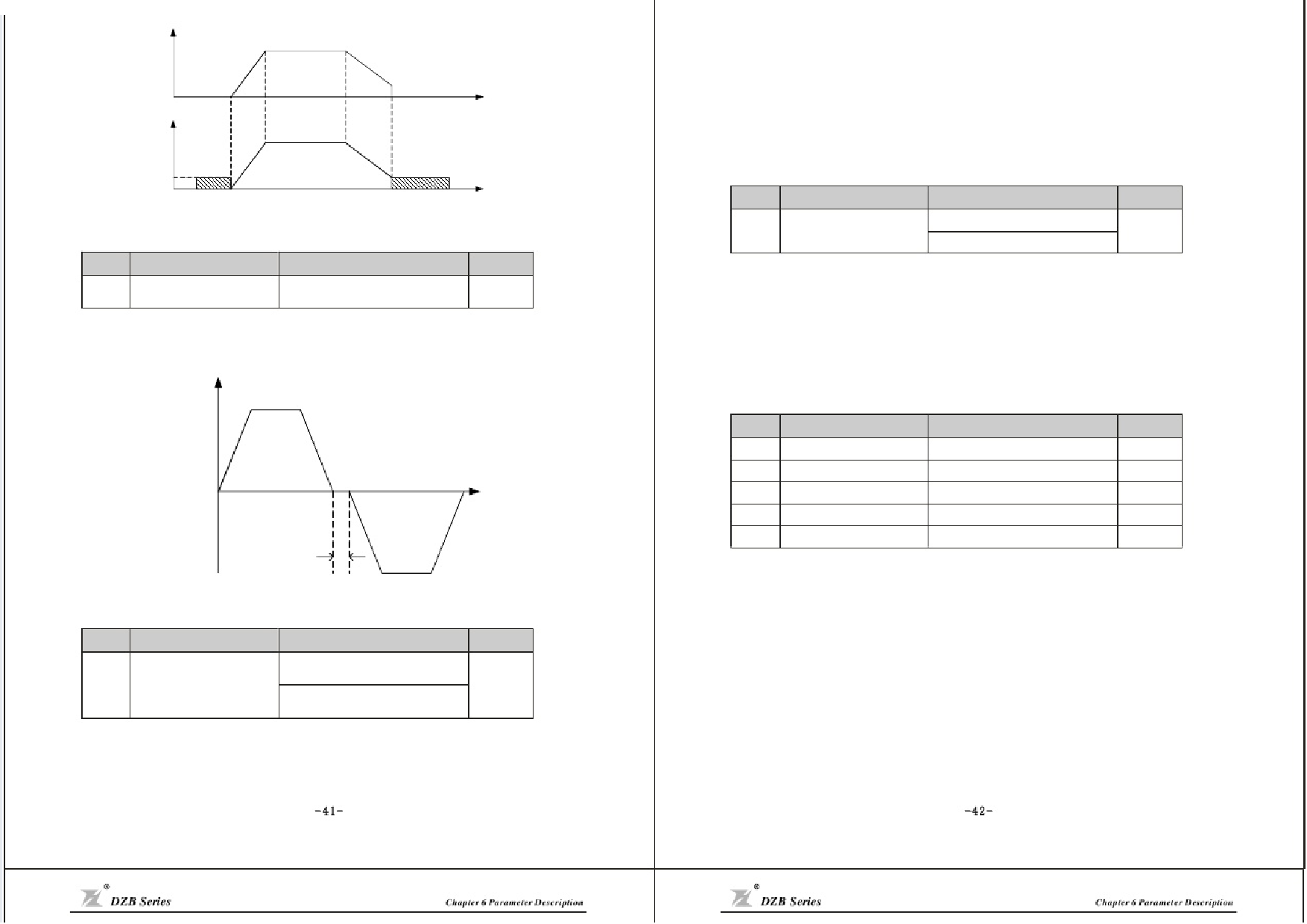
D C B r a k e
w h e n
s ta r t in g
D C B ra k e
w h en
s to p p in g
Fig. 6-3 DCBra ke Diagram
Function
Code
Name
F0.24
Dead time between
forwarda nd reverse
Setting Range
0 .0~3 6 00 . 0 s
T im e t
Default
Value
0.0s
It is to set the transient time during w hich the output frequency is 0 in the FWD/REV transient process
of inverter.
It is shown as following figure:
Output
Frequency f
Forward
Reverse
Time t
Function
Code
Name
F1.00 Inverter model
Setting Range
0:B model
1:P model
Default
Value
Set by
model
0: suitable for constant torque load of d esignated nominal parameter.
1: suitable for variable torque l oad (such as fan and pump).
Constant torque(B model) inverter can dri ve larger variable torque(P model) load directly.
For example, ‘DZB300B0220L4’ inverter is set 22KW B model as default, if you want to drive 30KW
fan, you should
● Set F1.00 as 1
● Set F1 group motor parameter again
Function
Code
F1.01
Name
Motor rated power
F1.02 Motor rated frequency
F1.03 Motor rated speed
F1.04 Motor rated voltage
F1.05 Motor rated current
Setting Range
0 . 4~9 00 . 0k W
0 . 01 H z~F 0 . 04
0~3 60 0 0r p m
0~4 60 V
0 . 1~1 00 0. 0 A
Default
Value
Set by
model
50.00Hz
Set by
model
Set by
model
Set by
model
Dead Time
Fig. 6-4 FWD/REV Dead Time Diagram
Function
Code
Name
F0.25
Terminal command
protection when
power on
Setting Range
0:Terminal command invalid
when power on
1:Terminal command valid when
power on
Default
Value
0~1
If operating command channel is set to terminal control, s ystem will detect terminal status
automatically during inverter power on.
Note: please set these codes according to motor na meplate parameters. The superior performances
of vector control require precise motor parameters.
DZB series inverter provides parameter self-learning function. Accurate parameter self-learning comes
from correct setting of motor nameplate parameters.
In order to ensure the control perform ances, please do the motor setting based on t he inverter standard
adaptive motor. If the motor rated power has a too big difference to the standard adaptive motor, the inverter
control performances will be deteriorated distinctly.
Note: resetting of motor rated power (F1.01) can initialize motor parameter F1.02-F1.10.
-41-
-42-
http://slide pdf.c om/re a de r/full/fuling-inve r te r-use r-ma nua l
24/54
 Fuling DZB200_DZB300 Inverter User Manual")
 Fuling DZB200_DZB300 Inverter User Manual")
 Fuling DZB200_DZB300 Inverter User Manual")
 Fuling DZB200_DZB300 Inverter User Manual")
 Fuling DZB200_DZB300 Inverter User Manual")
 Fuling DZB200_DZB300 Inverter User Manual")
 Fuling DZB200_DZB300 Inverter User Manual")
 Fuling DZB200_DZB300 Inverter User Manual")
 Fuling DZB200_DZB300 Inverter User Manual")