
5/14/2018
Fuling Inve r te r Use r Ma nua l - slide pdf.c om
Function
Code
Name
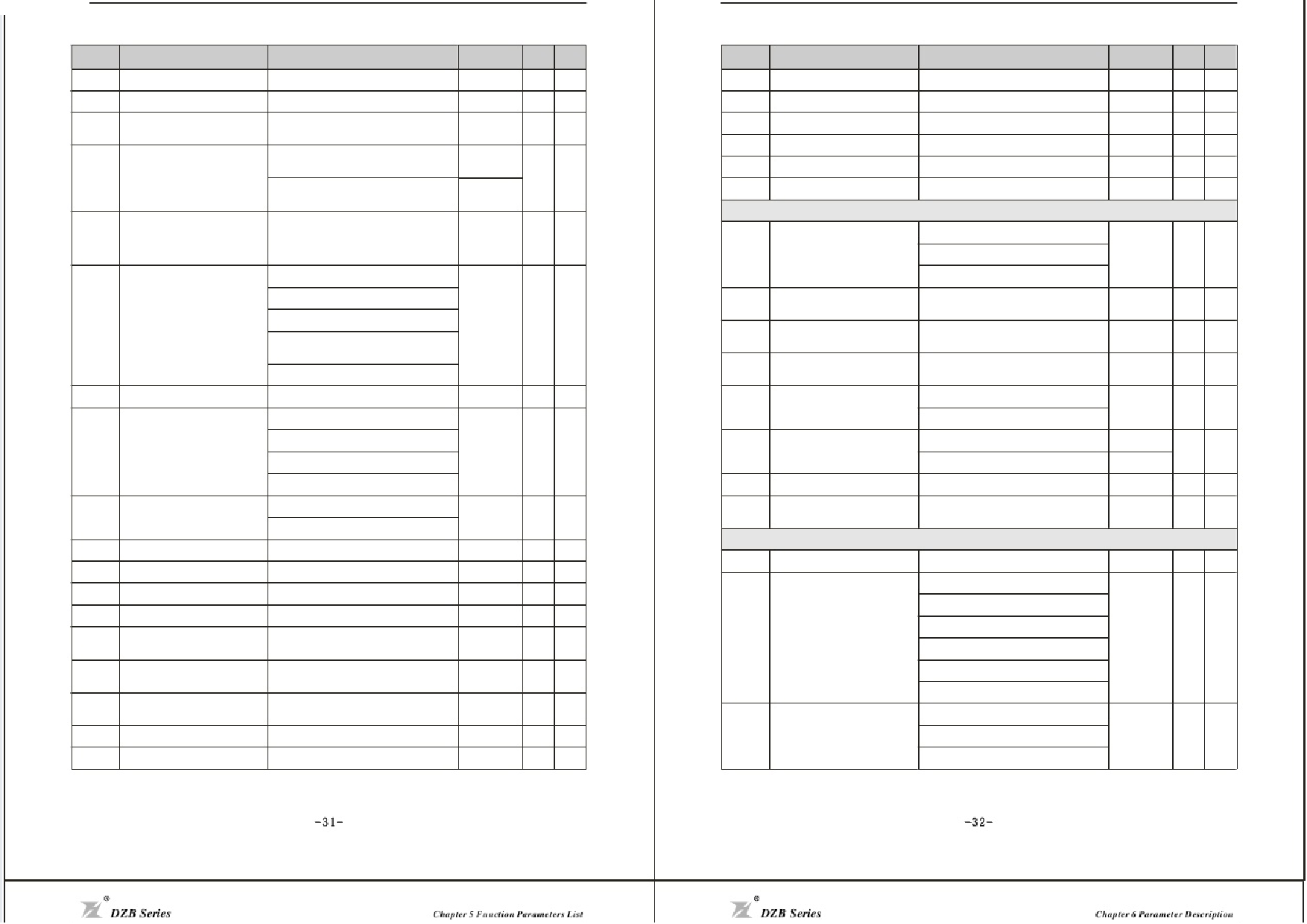
F4.13 FDT level detection value
Setting Range
0.00~ F0. 04
Default
Value
50.00Hz
Modifi Serial
cation No
※ 110.
Function
Code
Name
F4.31 Multi-Speed 2
Setting Range
-100.0~100.0%
Default
Value
0.0%
Modifi Serial
cation No
※ 128.
F4.14 FDTdelay detectionvalue 0.0~100.0%(FDT level)
5.0%
※ 111.
F4.32 Multi-Speed 3
-100.0~100.0%
0.0%
※ 129.
Frequencyr eaching
F4.15 detection range
F4.16
Brake Threshold
Value Voltage
F4.17
Speed display
ratio
0.0~100.0%(maximum frequency) 0.0%
115.0~140.0%(standard DC bus
voltage) 380V
115.0~140.0%(standard DC bus
voltage) 220V
130.0%
120.0%
0 . 1~9 9 9. 9%
Speed=120×running
frequency×F4.17/pole number
100.0%
0:Given by Keyboard(F4.19)
※ 112.
※ 113.
※ 114.
F4.33
F4.34
F4.35
F4.36
Multi-Speed 4
Multi-Speed 5
Multi-Speed 6
Multi-Speed 7
F5.00
Motor Overload
ProtectionOption
~
-100.0 100.0%
-100.0~100.0%
-100.0~100.0%
-100.0~100.0%
F5 Protection Parameters
0:No protection
1:normal motor
2:Variable Frequency motor
0.0%
0.0%
0. 0%
0.0%
※ 130.
※ 131.
※ 132.
※ 133.
1
● 134.
F4.18
PIDsetpoint
SourcesOp tion
1:Given byAnalog Channel VI
2:Given byAnalog Channel CI
3:Given by Remote
Communication
4:Multi-segsetpoint
0
※ 115.
F5.01
F5.02
F5.03
Motor Overload
ProtectionCurrent
Power-down Frequency
Drop Point
Instantp ower-down
Frequency drop rate
20.0%~120.0%
(motor rated current)
70.0~110.0%(standard bus
voltage)
0 . 0 0H z~F 0 . 04
100.0% ※ 135.
80.0%
※ 136.
0.00Hz ※ 137.
F4.19 Preset PID setpoint
0 . 0%~1 0 0. 0 %
0:VI Feedback
0.0%
※ 116.
F5.04
Over-voltage
Stall Protection
0:p r oh i bi t
1:a ll ow
0
※ 138.
PIDFeedback
F4.20 SourcesOp tion
1:CI Feedback
2:VI+CI Feedback
0
※ 117.
F5.05
Over-voltage Stall
ProtectionVoltage
110~150%(380V)
110~150%(220V)
120%
115%
※ 139.
3:Communication feedback
F5.06 Auto limit current level
1 00~2 00 %
200%
※ 140.
F4.21
PID Output Characteristics
Option
0:p os i ti v e
1:P ne ga t i ve
F4.22 Proportional gain (Kp)
F4.23 Integral time (Ti)
F4.24 Differential time (Td)
0 . 00~1 0 0. 0 0
0 . 01~1 0 .0 0 s
0 . 00~1 0 .0 0 s
F4.25 Sampling cycle time (T)
F4.26
PIDcontrol
discrepancy limit
0 . 01~1 0 0. 0 0 s
0 . 0~1 0 0. 0%
0
1.00
0.10s
0.00s
0.10s
0.0%
※ 118.
※ 119.
※ 120.
※ 121.
※ 122.
※ 123.
F5.07
F 6 .0 0
F6.01
Limit current frequency
drop rate
0 . 0 0~5 0 . 00 H z /s
0.00Hz/s
F6 Communication Parameters
Communication Address 1~247,0 is the broadcast address
1
0:1 20 0 BP S
1:2 40 0 BP S
2:4 80 0 BP S
Baud rate setting
3
3:9 60 0 BP S
※ 141.
※ 142.
※ 143.
F4.27
Feedback disconnection
detecting value
F4.28
Feedback disconnection
detecting time
0 . 0~1 0 0. 0%
0 . 0~3 6 00 .0 s
0.0%
1.0s
※ 124.
※ 125.
4:1 92 0 0B P S
5:3 84 0 0B P S
0:No check(N,8,1)for RTU
F4.29 Multi-Speed 0
-100.0~100.0%
0.0%
※ 126.
F6.02 Data pattern
1:Oddcheck(E,8,1)for RTU
0
※ 144.
F4.30 Multi-Speed 1
-100.0~100.0%
0.0%
※ 127.
2:Even check(O,8,1)forRTU
-31-
-32-
http://slide pdf.c om/re a de r/full/fuling-inve r te r-use r-ma nua l
19/54
 Fuling DZB200_DZB300 Inverter User Manual")
 Fuling DZB200_DZB300 Inverter User Manual")
 Fuling DZB200_DZB300 Inverter User Manual")
 Fuling DZB200_DZB300 Inverter User Manual")
 Fuling DZB200_DZB300 Inverter User Manual")
 Fuling DZB200_DZB300 Inverter User Manual")
 Fuling DZB200_DZB300 Inverter User Manual")
 Fuling DZB200_DZB300 Inverter User Manual")
 Fuling DZB200_DZB300 Inverter User Manual")