
- You are here:
- AM.CO.ZABuythisCNC Utilities Homepage
- EasyRoute-CNC-Router
- Component Manuals
- VICSION VS500 Inverter Manual.pdf
- Page 56 of 113
52 VICSION VS500
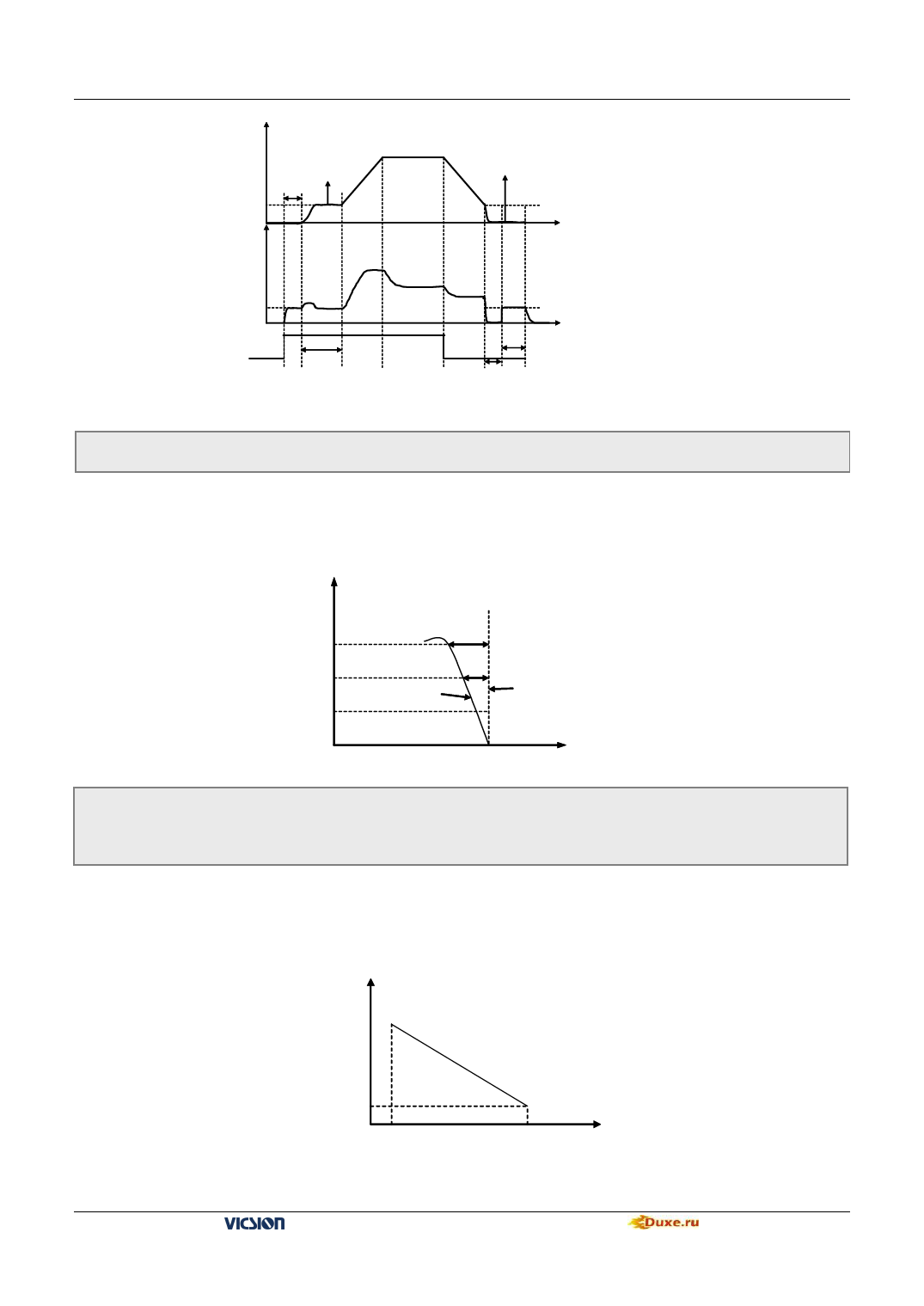
Output Freq
[F4.1]
Starting freq.
[F1.12]
Output current
DC braking
[F4.4]
[F1.11]
Instruction
[F4.2]
[F4.7]
[F4.6]
[F4.5]
Fig.6-7 Process of start and stop
F1.13 Compensate for slip freq.
Setting range: 0.0 ~ 150(%)
The actual slip of motor will change with the load change. The inverter, through setting of this functional parameter,
will automatically regulate its output frequency according to the load condition to compensate the influence of the load
on motor speed. This parameter is only valid for V/F control mode.
Output freq
Compensation for slip freq. is 100%
150%
100%
50%
Before
After
Rotor speed
Fig.6-8 Compensate for slip freq
F1.14 Droop control
F1.15 Initial level of droop control
F1.16 Ending level of droop control
Setting range:0.0 ~ 100.0(%)
Setting range: 0 ~ 150%
Setting range:10 ~ 200%
Droop control is a special control mode to poise output power when multi-inverters inverter the same load or rotator
speed of motor will change with the load. It will poise power and torque by setting those parameters, when
multi-inverters inverter the same load. If those parameters are appropriate set, applied asynchronous motor will have
the same characteristic with torque motor. Shown as fig6-9.
Rotate speed(Relative value
100
100-[F1.14]
Torque (Relative value)
[F1.15]
[F1.16]
Fig6-9 Motor characteristic when droop control
VS500 series of general purpose inverter Duxe.ru
 VICSION VS500 Inverter Manual")
 VICSION VS500 Inverter Manual")
 VICSION VS500 Inverter Manual")
 VICSION VS500 Inverter Manual")
 VICSION VS500 Inverter Manual")
 VICSION VS500 Inverter Manual")
 VICSION VS500 Inverter Manual")
 VICSION VS500 Inverter Manual")