
- You are here:
- AM.CO.ZABuythisCNC Utilities Homepage
- EasyRoute-CNC-Router
- Component Manuals
- SBM 绝对值系列交流伺服驱动器 设计调试篇.pdf
- Page 62 of 109
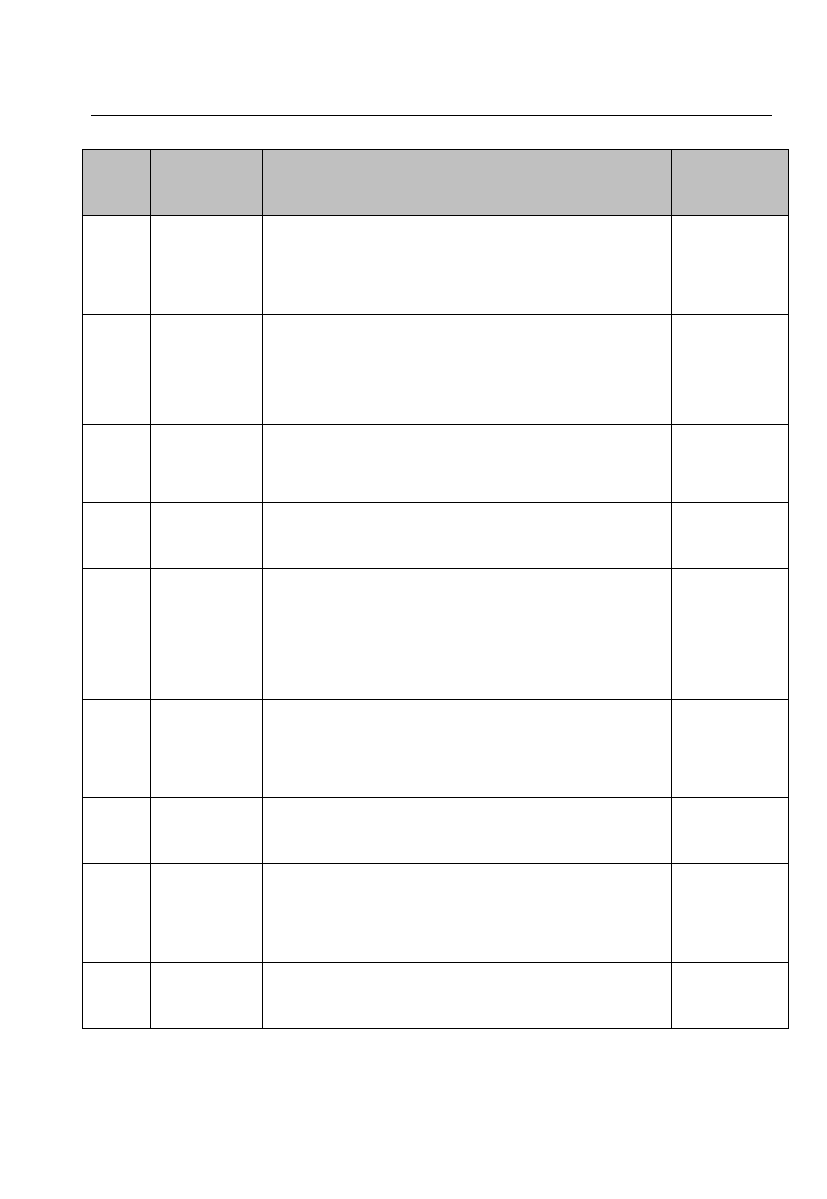
第六章 参 数
参数
号
15
16
17
18
19
20
21
22
23
参数名称
位置指令
脉冲方向
取反
定位完成
范围
位置超差
检测范围
位置超差
是否检测
位置指令
平滑滤波
驱动禁止
输入无效
JOG 运行
速度
内外
速度
选择
最高速度
限制
功能详解
0: 默认方向;
1: 方向取反;
参数范围
[默认值]
0~1
[ 0 ]
a, 位置控制时,位置偏差计数器内数值小于或
等于设定值时,定位完成 COIN ON 否则 OFF;
b, 其它控制模式下,为速度到达信号;
0~3000
[ 20 ]
在位置控制方式下,当位置偏差计数器的计数值
大于本参数设定值时,伺服驱动器报警;
0~3000
[ 400 ]
0:检测有效;1:屏蔽 4 号报警,PA17 无效;
0~2
2:屏蔽 4 号、6 号报警,PA17 无效;
[ 0 ]
主要针对上位机没有加减速,不具有指数形式的
加减速时,此参数可对指令脉冲进行平滑过滤,
并对加减速进行优化。
0~3000
[ 0 ]
此滤波不会丢失脉冲,执行速度可能出现延时。
0: CCW、CW 输入禁止有效;
0~2
1: CCW、CW 输入禁止无效;
[ 1 ]
2: CCW、CW 输入禁止有效,无报警提示;
设置 JOG 模式时正反向的速度设定。
-3000~3000
[ 120 ]
0:取内部速度;
0~2
1:取外部模拟量(-10V~+10V);
[ 1 ]
2:取外部模拟量(0~+10V;14,15 脚控制正反);
设置伺服电机的最高限速与伺服电机有关,
按照参数电机型号来设置电机的最高转速。
0~5000
[ 3600 ]
- 54 -
 SBM 绝对值系列交流伺服驱动器 设计调试篇")
 SBM 绝对值系列交流伺服驱动器 设计调试篇")
 SBM 绝对值系列交流伺服驱动器 设计调试篇")
 SBM 绝对值系列交流伺服驱动器 设计调试篇")
 SBM 绝对值系列交流伺服驱动器 设计调试篇")
 SBM 绝对值系列交流伺服驱动器 设计调试篇")