
第四章 接 口
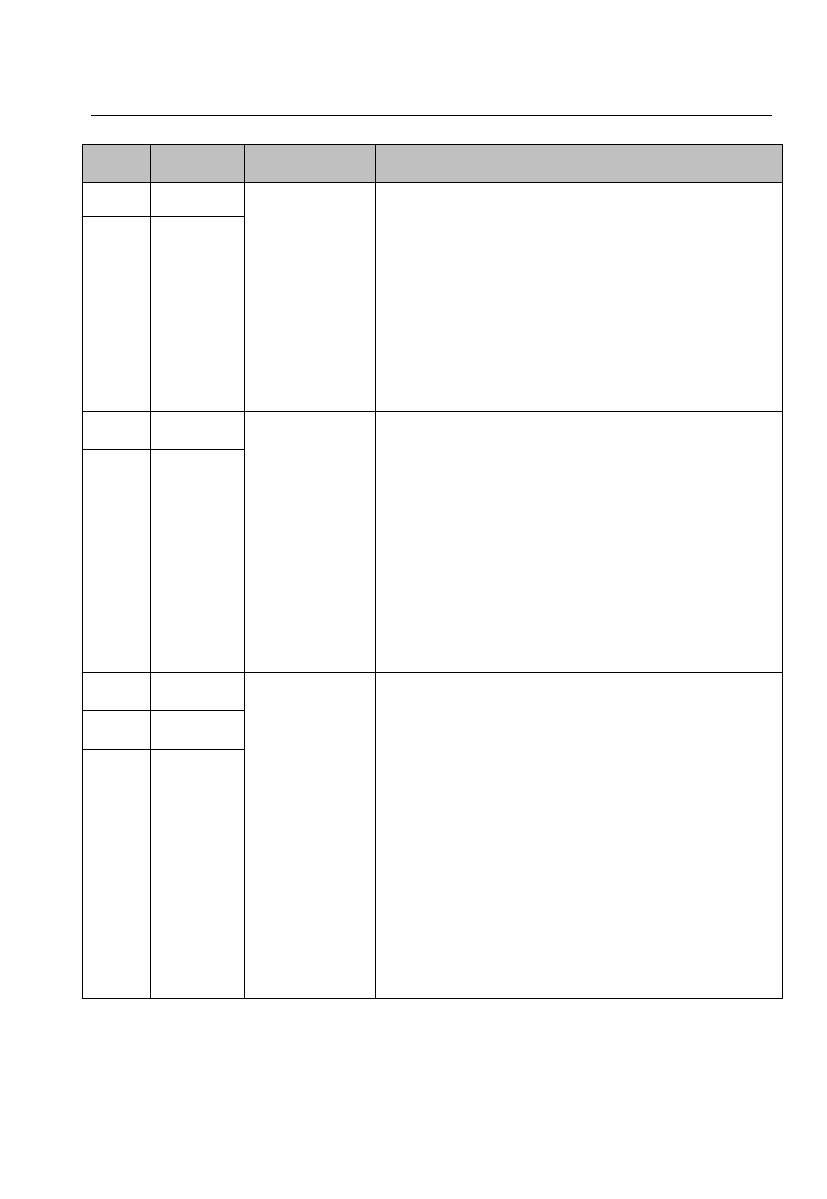
引脚 标识
26 ALM+
27 ALM-
28 COIN+
29 COIN-
30 BRK+
31 BRK-
信号名称
功 能
伺服报警输
出
第二回零(西
门子用)
定位完成
或速度到达
机械制动器
(抱闸)松紧
例:26 脚接+24V,27 脚接上位机。
在伺服报警时上位机能接收到+24V 电平。
伺服正常时+24V 与上位机断开。
例:27 脚接 0V,26 脚接上位机。
在伺服正常时上位机能接收到 0V 电平。
伺服报警时 0V 与上位机断开(常闭)。
●通过参数 PA57 号可电平取反或常开常闭切换
例:28 脚接+24V,29 脚接上位机。
定位完成或速度到达或零位时上位机能接收到
+24V 电平,否则+24V 与上位机断开。
例:29 脚接 0V,28 脚接上位机。
定位完成或速度到达或零位时上位机能接收到
0V 电平,否则 0V 与上位机断开。
●通过参数 PA57 号可电平取反或常开常闭切换
●机床行业多为西门子 801、802 数控回零用
抱闸开关输出端:
例:30 脚接+24V,31 脚接继电器线圈正。
当电机使能后中间继电器线圈能接收到+24V
电平,否则+24V 与中间继电器线圈断开。
例:31 脚接 0V,30 脚接继电器线圈负。
当电机使能后中间继电器线圈能接收到 0V 电
平,否则 0V 与中间继电器线圈断开。
●通过参数 PA57 可电平取反或常开常闭切换
●PA47 设定抱闸延时通
●PA48 设定使能延时断
- 27 -
 SBF DO-1000B C T系列全数字交流伺服驱动器连接调试说明书")
 SBF DO-1000B C T系列全数字交流伺服驱动器连接调试说明书")
 SBF DO-1000B C T系列全数字交流伺服驱动器连接调试说明书")
 SBF DO-1000B C T系列全数字交流伺服驱动器连接调试说明书")
 SBF DO-1000B C T系列全数字交流伺服驱动器连接调试说明书")
 SBF DO-1000B C T系列全数字交流伺服驱动器连接调试说明书")