
Chapter 6 Alarm
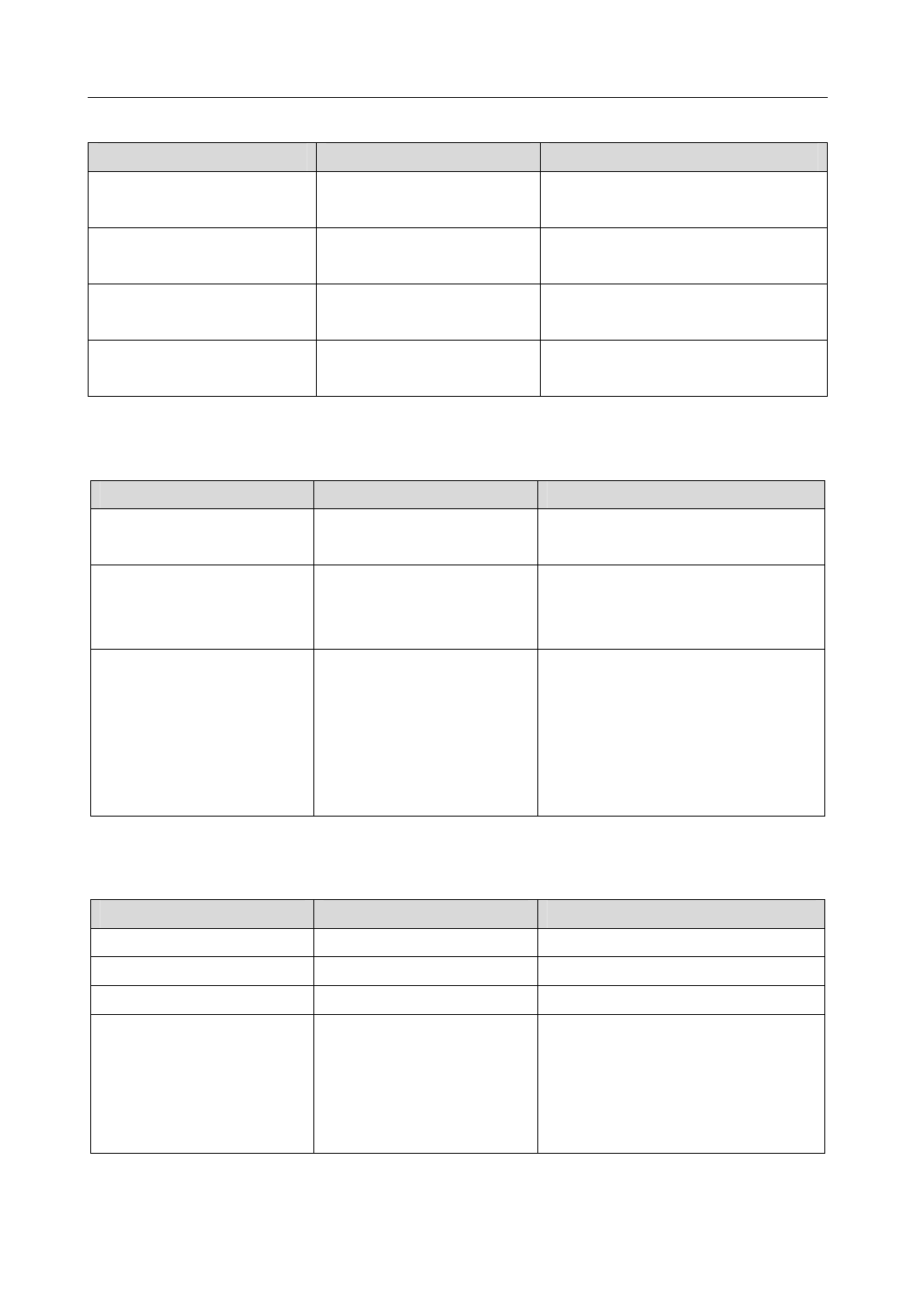
Err13 (Over-load)
Potential cause
Excess the rated load for
continuous duty operation
System unstable
Acceleration/deceleration is too
short
Encoder zero point changes
Check
Check the load factor
Check the oscillation when
servomotor is in running
Check the smoothness when
servomotor is in running
Check the encoder zero point
Handle
Reduce load or replace the servo driver
with bigger one.
Reduce the gains of the system.
Increasing acceleration/deceleration time
setting.
Install the encoder again and adjust the
zero point.
Err14 (Overload of brake peak power)
Potential cause
The voltage of input AC power
supply is too high
Regeneration fault
Regeneration energy too large
Check
Check the voltage of power
supply
Regenerative resistor and/or
IGBT damaged; Connection
circuit is open.
Check the regeneration load
factor
Handle
Use correct power supply according with
the specifications.
Repair.
z Slow down the starting and
stopping frequency.
z Increasing acceleration/deceleration
time setting.
z Replace the servo driver and
servomotor with bigger ones.
Err15 (Encoder counter error)
Potential cause
Encoder wiring error
Ground is bad
Suffer from interference
Encoder has problem
Check
Check the encoder wiring
Check the ground wiring
Check interference source
z Check the line number
and pole number
z Check the encoder Z
signal
z Encoder damaged
Handle
Correct wiring included shield wire.
Ground correctly.
Keep away interference source.
Replace the encoder.
84
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")