
Chapter 5 Parameters
P076 JOG running speed
z Set the running speed for JOG operation.
Range
0~5000
Default
value
100
Unit Usage
r/min S
P080 Position deviation limit
Range
Default
value
Unit Usage
0.00~327.67
4.00
turn
P
z Set the position deviation range for alarm when the deviation exceeds this parameter.
z Under position control mode, when the counting value of position deviation counter exceeds the pulses
corresponding to this parameter value, the servo driver gives the position deviation alarm (Err 4).
z The unit is one circle. Multiplying the resolution of encoder with the value of this parameter can obtain the
total pulse number. For example, the encoder has 2500 lines and the resolution of encoder is 10000. If the
parameter value is 4.00, then corresponds to 40000 pulses.
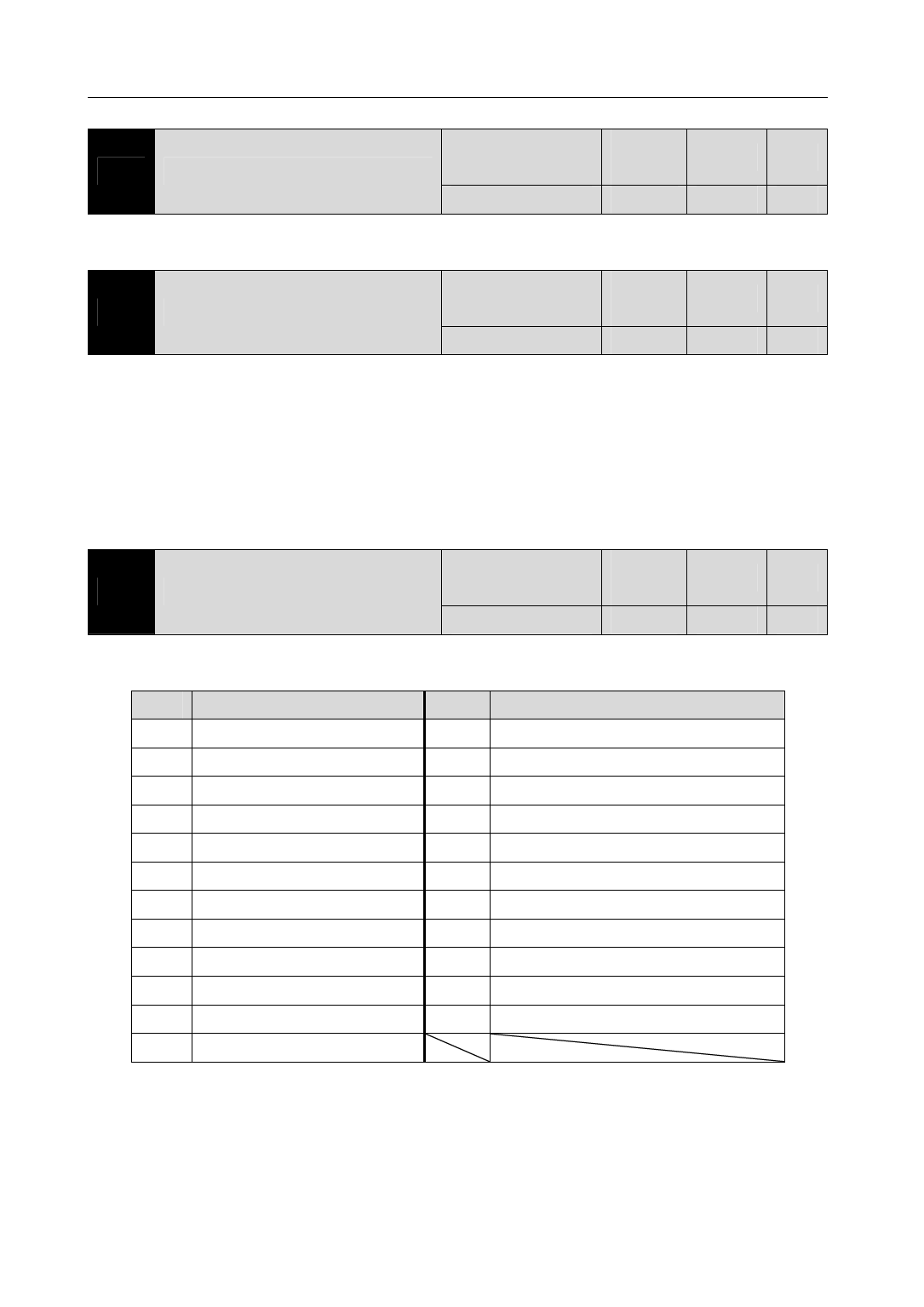
P096 Items of initial display
Range
Default
value
Unit Usage
0~22
0
ALL
z Set the display status on the front panel after turn on the power supply. The meanings of this parameter are:
P096
0
1
2
3
4
5
6
7
8
9
10
11
Display item
Speed of servomotor
Original Position command
Position command
Position of servomotor
Position deviation
Torque
Peak torque
Current
Peak current
Frequency of input pulse
Speed command
Torque command
P096
12
13
14
15
16
17
18
19
20
21
22
Display item
Analog voltage of speed command
Analog voltage of torque command
Digital input DI
Digital output DO
Signals of encoder
Absolute position in one turn
Accumulative load ratio
Brake ratio
Control mode
Number of alarm
Reserved
68
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")