
5.4 Parameter description in detail
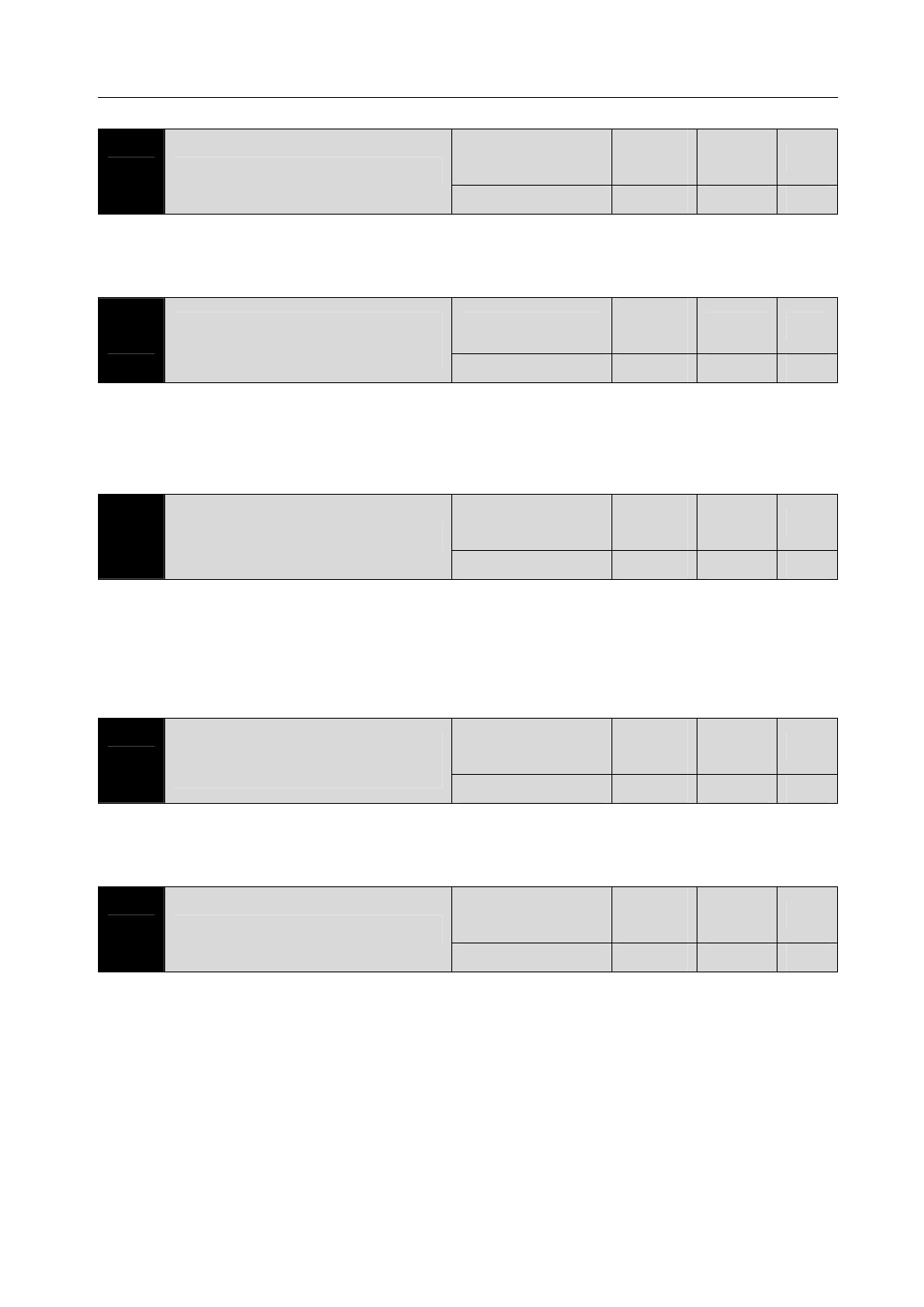
P017 Inertia ratio of load
Range
Default
value
Unit Usage
0.0~200.0
1.5
-fold P,S
z The load inertia ratio is that the inertia of mechanical load (refers to servomotor shaft) divides by the rotor
inertia of the servomotor.
Time constant of filter for speed
P019
detection
Range
0.50~50.00
Default
value
2.50
Unit Usage
ms P,S
z The bigger value of parameter can get the smoother detected speed signal. The smaller value of parameter
can get the quicker responded signal, but it will cause noise if the value is too small. In addition, it will cause
oscillation if the value is too big.
P021 Feed forward gain of position loop
Range
Default
value
Unit Usage
0~100
0
%
P
z The feed forward can reduce position-tracking error in the position control mode. Under any frequency
command pulse the position-tracking error always becomes zero if the parameter setting value is 100.
z Increasing the parameter value enhance the response of position control. It is easy to cause the system to be
unstable, oscillation if the parameter value is too large.
Time constant of feed forward filter
P022
for position loop
Range
0.20~50.00
Default
value
1.00
Unit Usage
ms
P
z For filtering the feed forward signal in position loop. This function is to increase the stability of feed forward
control.
P025 Sources of speed command
Range
Default
value
Unit Usage
3~5
3
S
z Set the source of the speed command in speed control mode.
z The meanings of this parameter are:
3:This is the JOG speed command. It needs to set this parameter when begins using the JOG operation.
4:This is the button speed command. It needs to set this parameter when begins using the (Sr) operation.
5:This is the demonstration speed command. It needs to set this parameter when begins using the
demonstration operation. The speed command can change automatically.
61
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")