
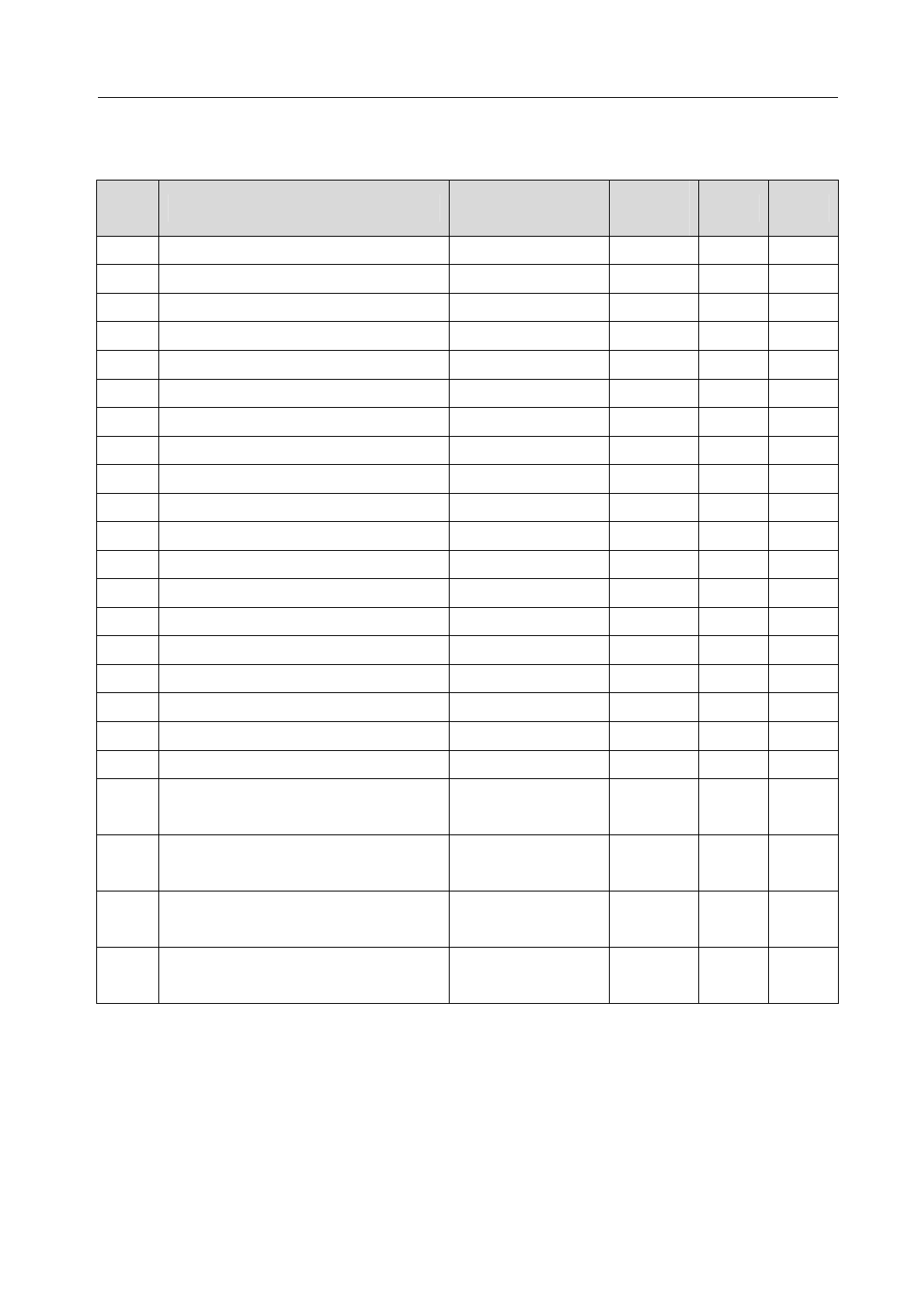
5.1.2 Parameters of section 1
5.1 Parameter table
Param
eter
Name
P100 Function of digital input DI1
P101 Function of digital input DI2
P102 Function of digital input DI3
P103 Function of digital input DI4
P104 Function of digital input DI5
P110 Filter of digital input DI1
P111 Filter of digital input DI2
P112 Filter of digital input DI3
P113 Filter of digital input DI4
P114 Filter of digital input DI5
P130 Function of digital output DO1
P131 Function of digital output DO2
P132 Function of digital output DO3
P150 Range for positioning completion
P151 Hysteresis for positioning completion
P154 Arrival speed
P155 Hysteresis of arrival speed
P156 Polarity of arrival speed
P163 The way of position deviation clearing
Speed check point for servomotor is near
P165
standstill
Delay time for electromagnetic brake
P166
when servomotor is in standstill
Waiting time for electromagnetic brake
P167
when servomotor is in motion
Action speed for electromagnetic brake
P168
when servomotor is in motion
Range
-21~21
-21~21
-21~21
-21~21
-21~21
0.1~100.0
0.1~100.0
0.1~100.0
0.1~100.0
0.1~100.0
-11~11
-11~11
-11~11
0~32767
0~32767
-5000~5000
0~5000
0~1
0~1
0~1000
0~2000
0~2000
0~3000
Default
value
1
2
3
4
20
2.0
2.0
2.0
2.0
2.0
2
3
8
10
5
500
30
0
0
Unit
ms
ms
ms
ms
ms
pulse
pulse
r/min
r/min
Usage
ALL
ALL
ALL
ALL
ALL
ALL
ALL
ALL
ALL
ALL
ALL
ALL
ALL
P
P
ALL
ALL
ALL
P
5
r/min ALL
0
ms ALL
500
ms ALL
100 r/min ALL
57
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")