
4.8 Electromagnetic holding brake
4.8 Electromagnetic holding brake
The electromagnetic brake (holding brake, lost power brake) is used in locking the vertical or the inclined
worktable of machine tool, which connected with the servomotor. When the power supply lost or SON is OFF,
prevent the worktable from fall and break. Realizes this function, must select and purchase the servomotor with
electromagnetic brake. The brake only can use for holding the worktable and cannot use for decelerating and or
stopping machine movement.
4.8.1 Parameters of electromagnetic holding brake
The parameters related to the electromagnetic brake:
Para
meter
Name
P165 Speed check point for servomotor is near standstill
Delay time for electromagnetic brake when
P166
servomotor is in standstill
Waiting time for electromagnetic brake when
P167
servomotor is in motion
Action speed for electromagnetic brake when
P168
servomotor is in motion
Range
0~1000
0~2000
0~2000
0~3000
Default
value
5
0
500
100
Unit
r/min
Usag
e
ALL
ms ALL
ms ALL
r/min ALL
4.8.2 Make use of electromagnetic holding brake
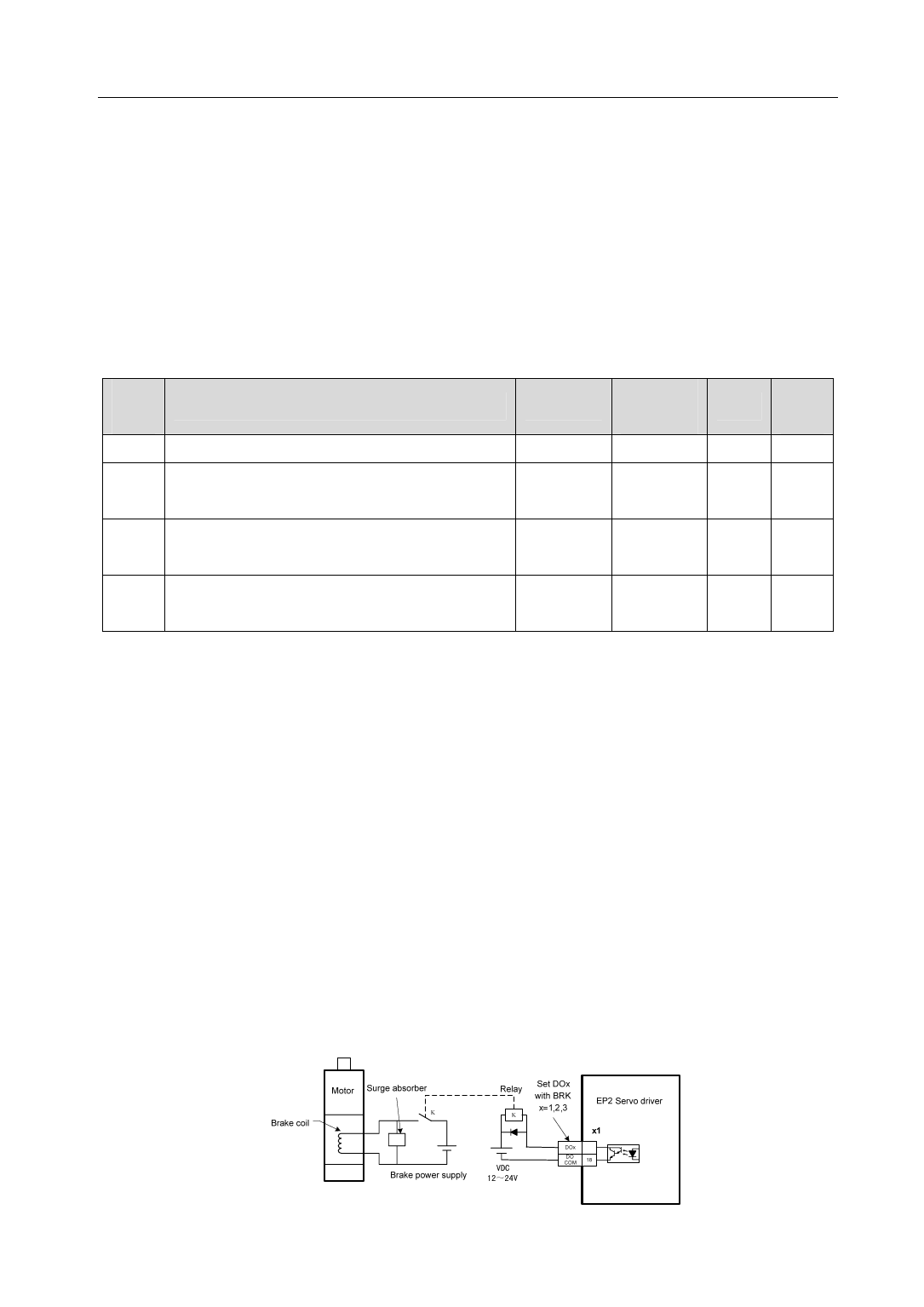
The chart below is the brake wiring diagram, the brake release signal BRK of the servo driver connect to the
relay coil, the contact of relay connect brake coil and DC supply. The brake power supply has enough capacity
provided by the user. Suggested installs the surge absorber to suppress surge voltage caused by switching off the
relay. The diode also makes the surge absorber, but must pay attention to that the action of the brake has a little
lagging.
Under the speed of the servomotor is smaller than parameter P165, if the SON becomes OFF. By now, the
servomotor will continue to excitation for holding the position, after the period set by parameter P166 removes the
excitation from the servomotor.
Under the servomotor is in motion (The speed is bigger than P165) if the SON becomes OFF, by now the
excitation is removed from the servomotor, after delay period of time the brake becomes active. During the delay
time, the servomotor decelerates from the high speed down to the low speed, and then the brake is active to avoid
damaging the brake. The delay time is set by the parameter P167 or is the time that the speed of the servomotor
decelerates to the speed set by parameter P168. The delay time will take the minimum value.
53
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")