Chapter 4 Running
4.3 Gain adjustment
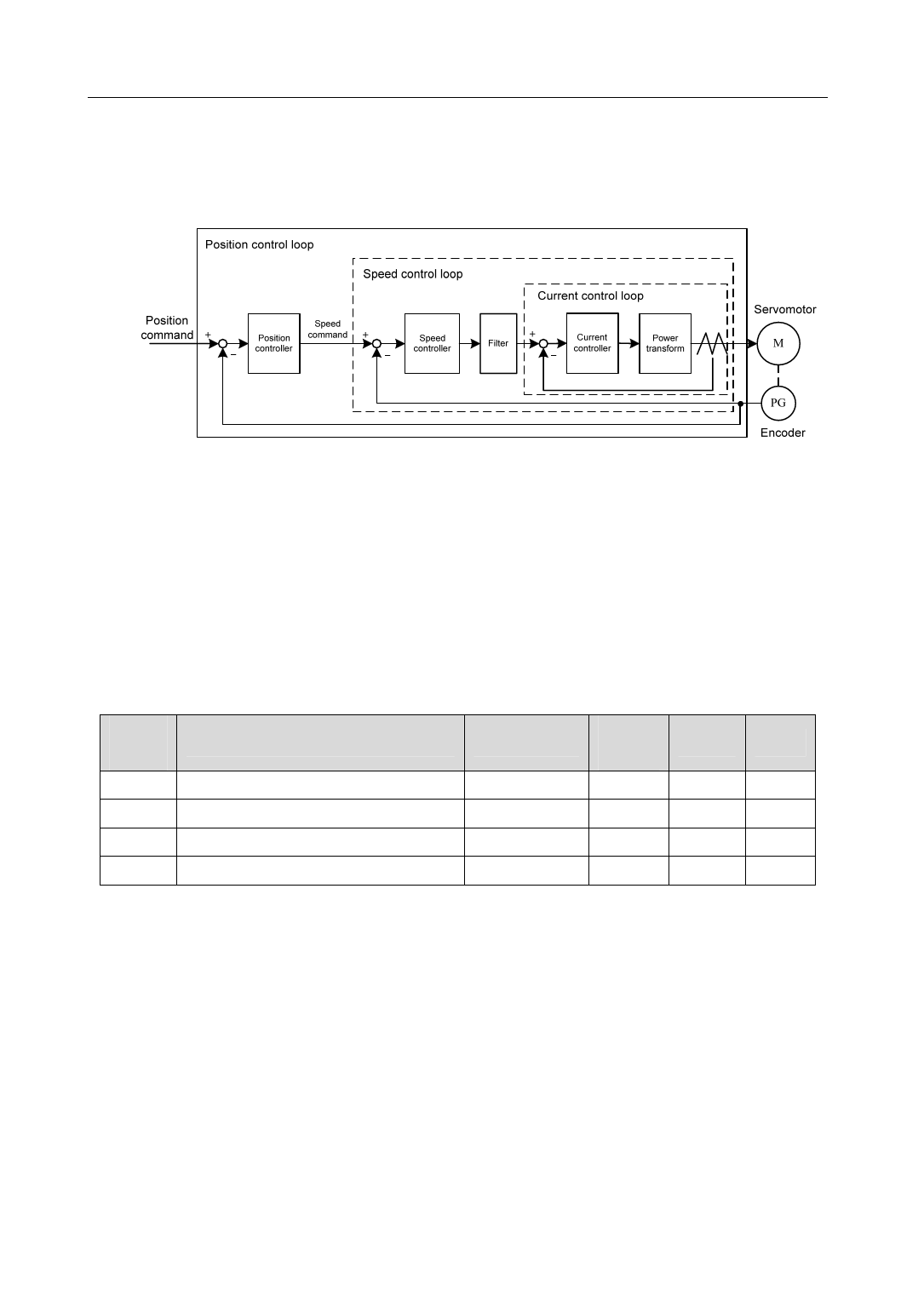
The servo driver includes the current control loop, the speed control loop and the position control loop. The
control diagram is as follows:
Theoretically, the inner control loop bandwidth must be higher than the outer loop; otherwise, the entire
control system will be unstable and creates the vibration or worse response. Therefore, the relations of the
bandwidth of the three control loops are as follows:
Bandwidth of the current loop>bandwidth of the speed loop>bandwidth of the of the position loop
Because the current control loop of the servo driver is already adjusted in an optimum condition, the only
parameters of speed and position control loops have to be adjusted by the user.
4.3.1 Gain parameters
The parameters related to the gain are:
Parame
ter
Name
P005 gain of speed loop
P006 integral time constant of speed loop
P009 gain of position loop
P017 Ratio of load inertia
Range
Default
Unit Usage
value
1~3000
40
Hz
P,S
1.0~1000.0 20.0
ms
P,S
1~1000
40
1/s
P
0.0~200.0
1.5
-fold P,S
The definition of symbol as follows:
Kv:The gain of speed loop;
Ti:The integral time-constant of speed loop;
Kp:The gain of position loop;
G: The inertia ratio of load (P017);
JL:The load inertia referred to the rotor shaft;
JM:The rotor inertia of the servomotor.
46

 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")