
Chapter 4 Running
4. The relation between the electronic gear ratio and the turn number of servomotor
The relation between the electronic gear ratio and the turn number of servomotor is:
Servomotor turn number= pulse × N
Pt × M
Among them, pulse is input pulse number. For example, the encoder line number C=2500 line, N=20, M=3,
pulse=1000, the calculation is:
Servomotor turn number=1000 × 20 = 2 (Turn)
10000 × 3 3
5. The relation between the electronic gear ratio and the speed of servomotor
The relation between the electronic gear and the speed of servomotor is:
Servomotor speed(r / min)= f (Hz) × 60 × N
Pt × M
Among them, f is the repeated frequency of the input pulse; unit is Hz (pps). For example, the encoder line
number C=2500 line, N=3, M=1, f=100kHz (kpps), the calculation is:
Servomotor speed(r / min)=100×103 × 60× 3 = 1800(r / min)
10000 ×1
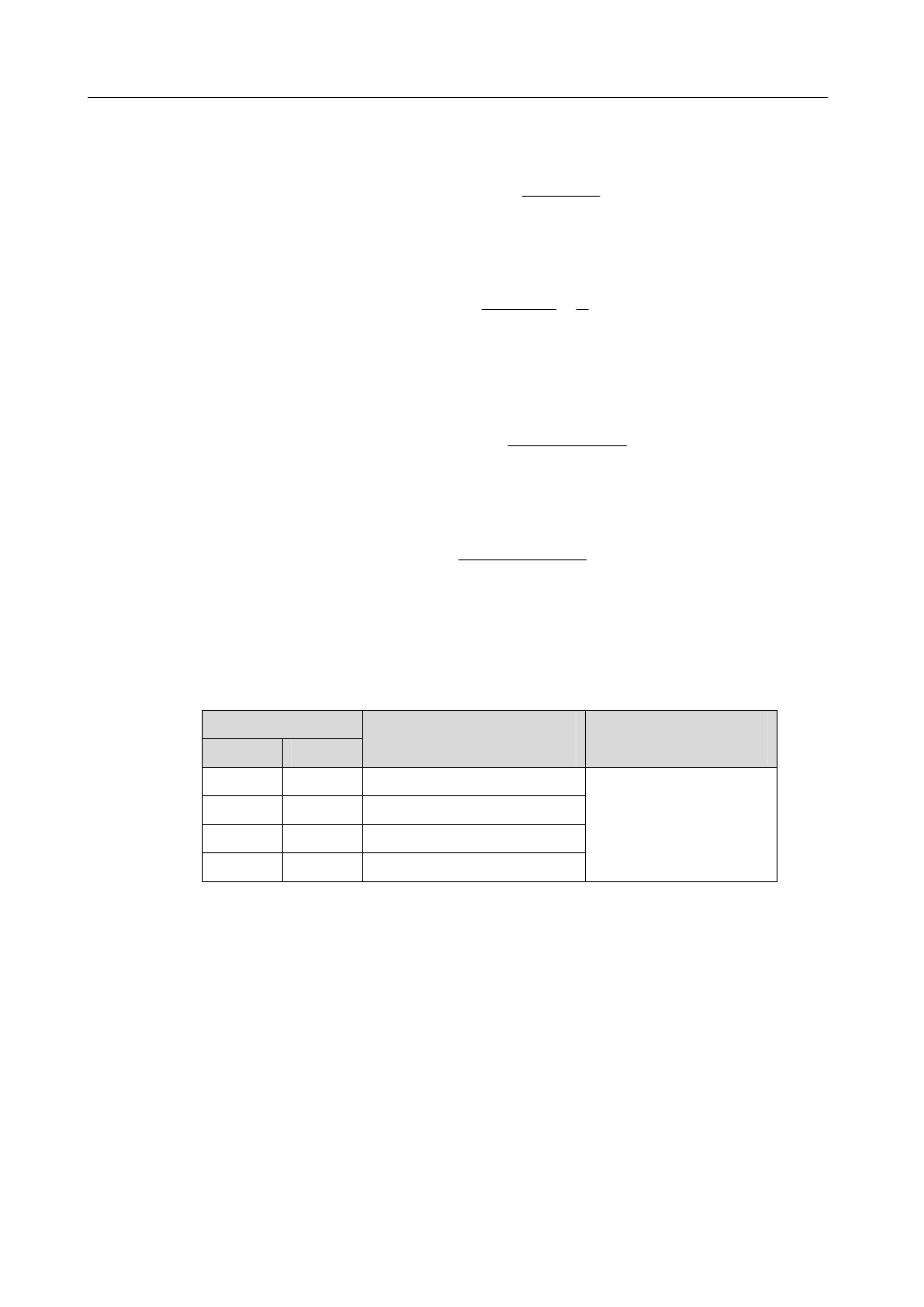
6. Electronic gear ratio switching
Four groups of electronic gear numerator N are provided in the servo driver. The group can be changed online
by signal of GEAR1 and GEAR2 from DI inputs. However, the denominator M is all the same.
DI signal[note]
Numerator of input
Denominator of input
GEAR2 GEAR1
electronic gear N
electronic gear M
0
0
1st numerator(parameterP029) Denominator
0
1
2nd numerator(parameterP031) (parameterP030)
1
0
3rd numerator(parameterP032)
1
1
4th numerator(parameterP033)
Note: 0 indicates OFF; 1 indicates ON.
44
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")