
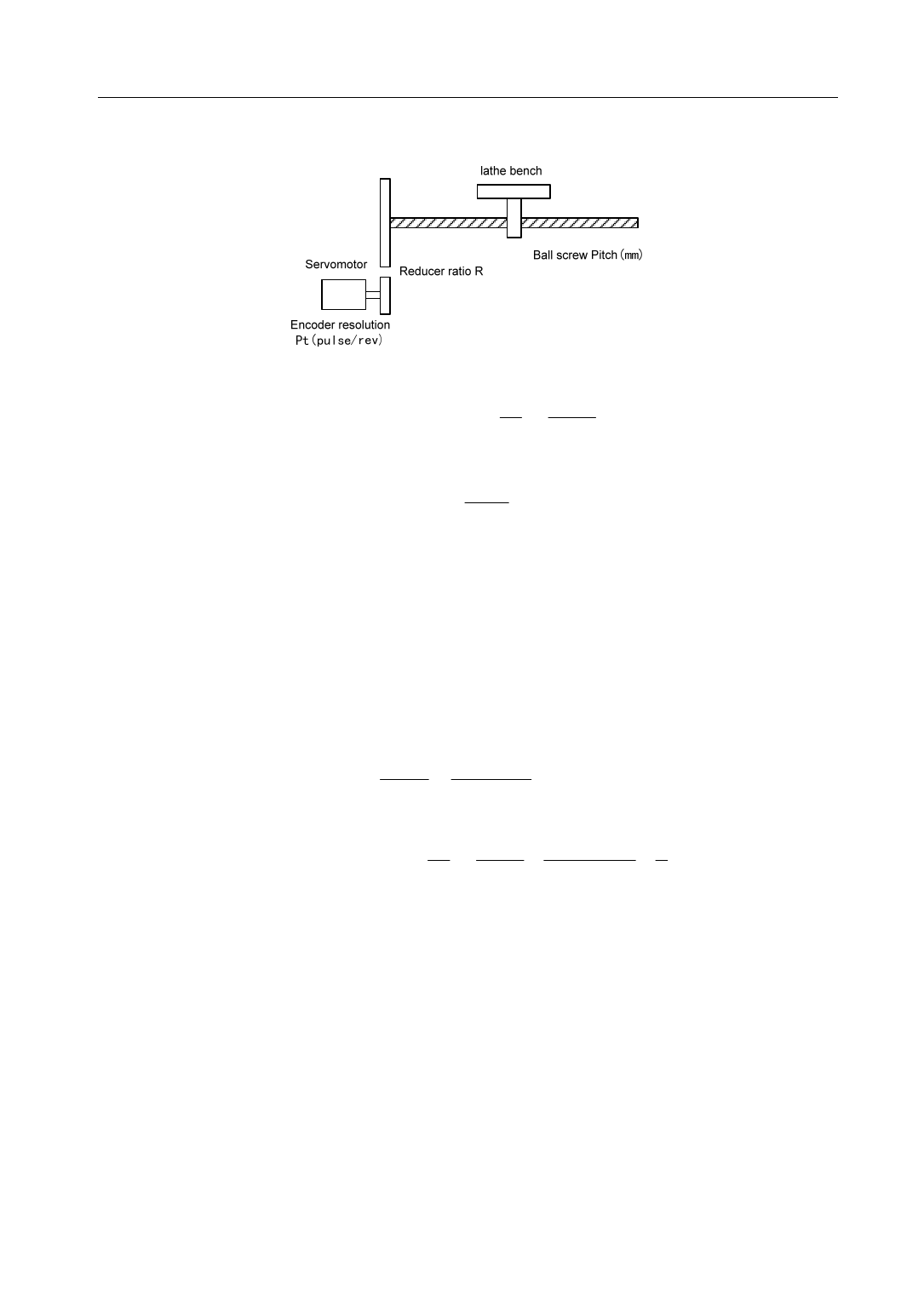
1. Electronic gear is used for ball screw drive
4.2 Position control mode
The ball bearing screw load has
Electronic gear ratio( N ) = Pt
M Pc × R
Here,
P c
=
Pitch
ΔP
For example:
Known the encoder line number C=2500 line, the reducer gear ratio 1/1, pitches Pitch=8mm, a pulse travel
equivalent ΔP=0.001mm. Calculate the electronic gear ratio.
Calculation step:
z Calculate the resolution of the encoder (Pt)
Pt = 4 × C = 4 × 2500 = 10000( pulse / rev)
z Calculate the command pulse numbers for one turn of the load shaft (ball-screw) (Pc)
Pc
=
Pitch
ΔP
=
8mm
0.001mm
=
8000
z Calculate the electronic gear ratio.
Electronic gear ratio( N ) = Pt = 10000 = 5
M Pc × R 8000 × (1/1) 4
z Set parameters (By first numerator as an example)
Numerator N=5,denominator M=4,set P029=5 and P030=4.
41
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")