Chapter 4 Running
4.2.3 Electronic gear for input commands
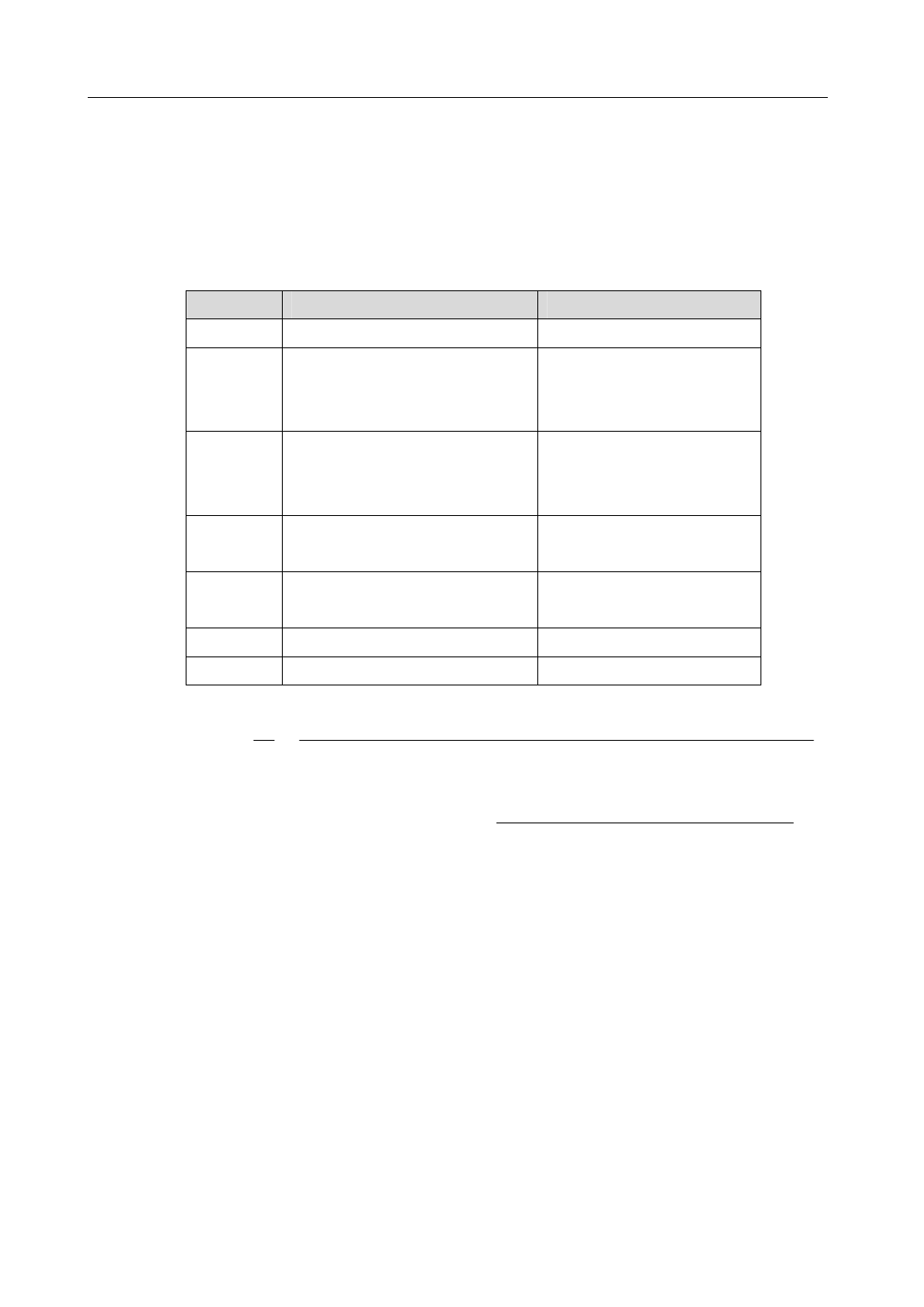
Through the electronic gear user can define that one input command pulse will cause an adjustable movement
of mechanical device. Therefore, the host controller does not have to consider that the gear ratio in the mechanical
system and the encoder line number of the servomotor .The electronic gear variable is illustrated in the following
table.
Variable
C
Pt
Explanation
Lines of encoder
Resolution of encoder (pulse/rev)
R
Ratio of reducer
ΔP
One command pulse travel
equivalent
Value of this driver
2500
=4×C
=4×2500
=10000(pulse/rev)
R=B/A,here
A:turn number of servomotor
B:turn number of load shaft
Pc
command pulse numbers for one
turn of the load shaft
Pitch Pitch of ball bearing screw (mm)
D
Diameter of rolling cylinder (mm)
Calculating formula:
Electronic gear ratio( N ) =
Resolution in one turn of encoder(Pt)
M Command pulse number in one turn of load shaft(Pc)× reducer ratio(R)
Here,
Command pulse number in one turn of load shaft (Pc) = Movement quantity in one turn of load shaft
Movement quantity in one command pulse
The calculated result will be abbreviated and make the numerator and the denominator smaller or equal to 32767
integer values. At last, the result must be in the range of 1/50<N/M<200 and write to the parameter list.
40

 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")