
5. Signal filter
4.2 Position control mode
Numeral filters related to the parameter P038 will filter the input signal PULS and SIGN. The bigger the
P308 value, the larger filter time-constant and the lower maximum repeated frequency of input pulse. If P038 is
seven, the maximum repeated frequency of input pulse will reach 500 kHz (kpps).
If the positioning is not accurate, increase the parameter P038 in order to filter noise on the signal cable and
to avoid counting error. The SIGN filter can close by parameter P039 setting.
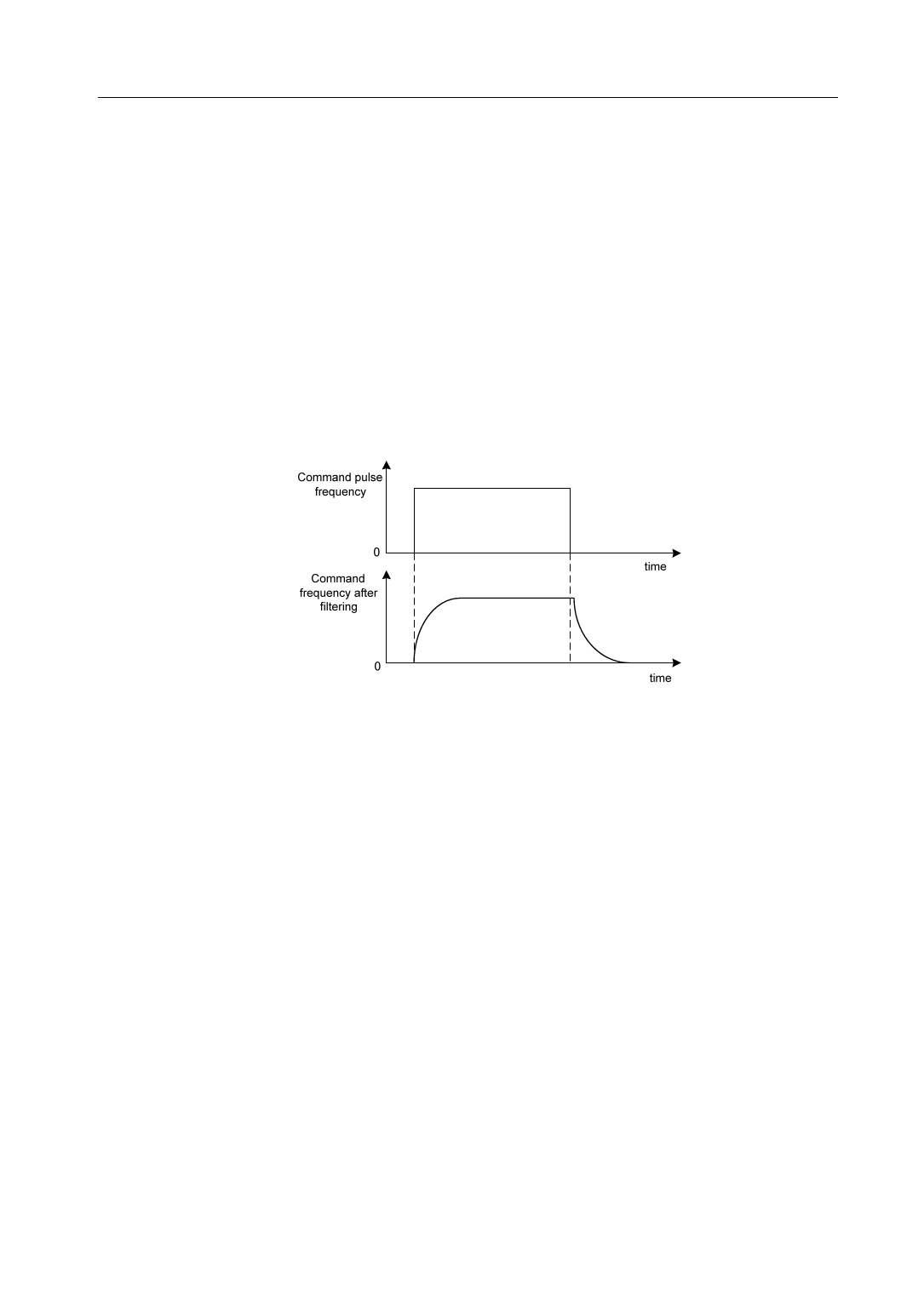
6. Smooth filter
The parameter P040 carries on the smooth filter to the command frequency. It has the exponential form for
acceleration and deceleration as showing in the following chart. The filter cannot lose any input pulse, but can
delay its action time. When P040 is zero, the filter does not have any effect. The parameter value indicates the
time in which the repeated frequency increases from 0 to 63.2% command frequency.
The filter makes the input repeated frequency smooth. This filter is used in the following situations: the host
controller is without acceleration and deceleration function; the electronic gear ratio is quite big; the command
frequency is lower.
39
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")
 Maxsine EP100 AC SERVO User Manual")